































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a Departament de Gestió i Dret, Facultat d'Economia, Universitat de Roma Tor Vergata, Via Columbia, 2, Roma 00133, Itàlia
- b Departament d'Administració d'Empreses, Facultat de Gestió, Universitat Kharazmi, 1599964511 Teheran, Iran
- c Facultat de Ciències de Bizerta, Universitat de Cartago, Zarzouna, 7021 Bizerta, Tunísia
- d School of International Management, Modul University Vienna, Am Kahlenberg 1, 1190 Viena, Àustria
| INFORMACIÓ DE L'ARTICLE | RESUM |
| Paraules clau: avions no tripulats UAV Agricultura de precisió Internet de les Coses Bibliometria | Els drons, també anomenats vehicles aeris no tripulats (UAV), han estat testimonis d'un desenvolupament notable en les últimes dècades. En l'agricultura, han canviat les pràctiques agrícoles oferint als agricultors un estalvi de costos substancial, augmentat eficiència operativa i millor rendibilitat. Durant les últimes dècades, el tema dels drons agrícoles ho ha fet va atreure una atenció acadèmica notable. Per tant, fem una revisió exhaustiva basada en la bibliometria per resumir i estructurar la literatura acadèmica existent i revelar les tendències i els punts de recerca actuals. Nosaltres aplicar tècniques bibliomètriques i analitzar la literatura que envolta els drons agrícoles per resumir i avaluar investigacions prèvies. La nostra anàlisi indica que la teledetecció, l'agricultura de precisió, l'aprenentatge profund, l'aprenentatge automàtic i l'Internet de les coses són temes crítics relacionats amb els drons agrícoles. La cocitació L'anàlisi revela sis grans grups de recerca a la literatura. Aquest estudi és un dels primers intents de resumir la investigació dels drons en agricultura i suggerir direccions futures de recerca. |
introducció
L'agricultura representa la principal font d'aliments del món (Friha et al., 2021) i s'ha enfrontat a greus reptes a causa del
l'augment de la demanda de productes alimentaris, la seguretat alimentària i els problemes de seguretat, així com les demandes de protecció del medi ambient, conservació de l'aigua i
sostenibilitat (Inoue, 2020). Es preveu que aquest desenvolupament continuï, ja que s'estima que la població mundial arribarà als 9.7 milions el 2050.
(2019). Atès que l'agricultura constitueix l'exemple més destacat del consum d'aigua a nivell mundial, s'espera que la demanda d'aliments i aigua
el consum augmentarà dràsticament en un futur previsible. A més, l'augment del consum de fertilitzants i pesticides
juntament amb la intensificació de les activitats agrícoles podria comportar futurs reptes ambientals. De la mateixa manera, les terres cultivables són limitades, i el
el nombre d'agricultors està disminuint a tot el món. Aquests reptes accentuen la necessitat de solucions agrícoles innovadores i sostenibles (Elijah
et al., 2018; Friha et al., 2021; Inoue, 2020; Tzounis et al., 2017).
La incorporació de noves tecnologies s'ha identificat com una solució prometedora per afrontar aquests reptes. Agricultura intel·ligent (Brewster et al.,
2017; Tang et al., 2021) i l'agricultura de precisió (Feng et al., 2019; Khanna i Kaur, 2019) han sorgit com a resultat d'aquests debats. El
la primera és una noció general per adoptar les tecnologies de la informació i la comunicació (TIC) i altres innovacions d'avantguarda en les activitats agrícoles per augmentar l'eficiència i l'eficàcia (Haque et al., 2021). Aquest últim se centra en la gestió específica del lloc en què es divideix el terreny
parts homogènies, i cada part obté la quantitat exacta d'input agrícola per optimitzar el rendiment dels cultius mitjançant noves tecnologies (Feng et al., 2019; Khanna i Kaur, 2019). Les tecnologies destacades que han cridat l'atenció dels estudiosos en aquest camp inclouen les xarxes de sensors sense fil (WSN) (J. Zheng i Yang, 2018; Y. Zhou et al., 2016), l'Internet de les coses (IoT) (Gill et al., 2017; He et al., 2021; Liu et al., 2019),
Tècniques d'intel·ligència artificial (IA), incloent l'aprenentatge automàtic i l'aprenentatge profund (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al., XNUMX;
2019), tecnologies informàtiques (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), big data (Gill et al., 2017; Tantalaki
et al., 2019) i blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
A més de les tecnologies esmentades anteriorment, la teledetecció s'ha considerat una eina tecnològica amb un alt potencial de millora
agricultura intel·ligent i de precisió. Els satèl·lits, els avions amb tripulació humana i els drons són tecnologies de teledetecció populars (Tsouros et al., 2019).
Els drons, coneguts popularment com a vehicles aeris no tripulats (UAV), sistemes d'aeronaus no tripulades (UAS) i aeronaus pilotades a distància, són de
gran importància ja que tenen múltiples avantatges en comparació amb altres tecnologies de teledetecció. Per exemple, els drons poden lliurar
imatges d'alta qualitat i alta resolució en dies ennuvolats (Manfreda et al., 2018). Així mateix, la seva disponibilitat i velocitat de transferència constitueixen altres
beneficis (Radoglou-Grammatikis et al., 2020). En comparació amb els avions, els drons són altament rendibles i fàcils de configurar i mantenir (Tsouros et al., 2019). Tot i que inicialment s'utilitzen principalment amb finalitats militars, els drons poden beneficiar nombroses aplicacions civils, per exemple en la gestió de la cadena de subministrament (A. Rejeb, Rejeb, et al., 2021a), amb finalitats humanitàries (A. Rejeb, Rejeb, et al., 2021c), agricultura intel·ligent, topografia i cartografia, documentació del patrimoni cultural, gestió de desastres i conservació de boscos i vida salvatge (Panday, Pratihast, et al., 2020). A l'agricultura, existeixen múltiples àrees d'aplicació dels drons, ja que es poden integrar amb noves tecnologies, capacitats informàtiques i sensors integrats per donar suport a la gestió dels cultius (per exemple, cartografia, seguiment, reg, diagnòstic de plantes) (H. Huang et al., 2021) , reducció de desastres, sistemes d'alerta primerenca, conservació de la vida salvatge i forestal, per citar-ne alguns (Negash et al., 2019). De la mateixa manera, els drons es podrien aprofitar en diverses activitats agrícoles, com ara el seguiment de cultius i creixement, estimació del rendiment, avaluació de l'estrès hídric i detecció de males herbes, plagues i malalties (Inoue, 2020; Panday, Pratihast, et al., 2020). Els drons no només es poden utilitzar amb finalitats de monitoratge, estimació i detecció basats en les seves dades sensorials, sinó també per al reg de precisió i la gestió de males herbes, plagues i malalties de precisió. En altres paraules, els drons són capaços de ruixar aigua i pesticides en quantitats precises basades en dades ambientals. Els beneficis dels drons a l'agricultura es resumeixen a la taula 1.
Principals beneficis dels drons a l'agricultura.
| Benefici | Referències |
| Millora temporal i espacial resolucions de detecció | (Gago et al., 2015; Niu et al., 2020; Srivastava et al., 2020) |
| Facilitar l'agricultura de precisió | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al., 2017) |
| Classificació i exploració de cultius | (Inoue, 2020; Kalischuk et al., 2019; Lopez- ´ Granados et al., 2016; Maimaitijiang et al., 2017; Melville et al., 2019; Moharana i Dutta, 2016) |
| Ús de fertilitzants | (L. Deng et al., 2018; Guan et al., 2019) |
| Seguiment de la sequera | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; Su et al., 2018) |
| Estimació de la biomassa | (Bendig et al., 2014) |
| Estimació del rendiment | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al., 2020) |
| Reducció de desastres | (Negash et al., 2019) |
| Conservació de la fauna i silvicultura | (Negash et al., 2019; Panday, Pratihast, et al., 2020) |
| Avaluació de l'estrès hídric | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al., 2019) |
| Plagues, males herbes i malalties detecció | (Gaˇsparovi´c et al., 2020; Inoue, 2020; J. Su, Liu, et al., 2018; X. Zhang et al., 2019) |
D'altra banda, els drons també s'enfronten a limitacions. Implicació del pilot, potència del motor, estabilitat i fiabilitat, qualitat dels sensors a causa de la càrrega útil
les limitacions de pes, els costos d'implementació i la regulació de l'aviació, es troben entre ells (C. Zhang i Kovacs, 2012). Comparem les mancances
de les tres tecnologies de teledetecció mòbil de la taula 2. Altres tecnologies de teledetecció, com els sensors del sòl, estan fora de l'enfocament d'aquest estudi.
Deficiències de diverses tecnologies de teledetecció mòbil.
| Teledetecció tecnologies | Les deficiències | referències |
| Drone (UAV) | Implicació del pilot; imatges' qualitat (mitjana); costos d'implementació (mitjans); estabilitat, maniobrabilitat i fiabilitat; estandardització; potència del motor; potència limitada fonts (longitud de la bateria); durada de vol limitada, col·lisió i ciberatacs; limitada pes de càrrega útil; grans conjunts de dades i tractament limitat de dades capacitats; manca de regulació; manca d'experiència, alta entrada barreres a l'accés drons agrícoles; | (Bacco et al., 2018; Dawaliby et al., 2020; Hardin i Hardin, 2010; Hardin i Jensen, 2011; Lagkas et al., 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al., 2008; Puri et al., 2017; Velusamy et al., 2022; C. Zhang i Kovacs, 2012) |
| Satellite | Cobertura periòdica per satèl·lit, resolució espectral limitada; vulnerabilitat a problemes de visibilitat (per exemple, núvols); Indisponibilitat i baixa velocitat de transferència; orientació i vinyetatge afecta dades espacials costoses col · lecció; lliurament de dades lenta temps per als usuaris finals | (Aboutalebi et al., 2019; Cen et al., 2019; Chen et al., 2019; Nansen i Elliott, 2016; Panday, Pratihast, et al., 2020; Sai Vineeth et al., 2019) |
| Aeronau | Alts costos d'adopció; configuració complicada; costos de manteniment; indisponibilitat de fiables avions, geometria del imatges; dades no habituals adquisició; manca de flexibilitat; accidents mortals; dades del sensor variacions degudes a vibracions; problemes de georeferenciació | (Armstrong et al., 2011; Atkinson et al., 2018; Barbedo & Koenigkan, 2018; Kovalev i Voroshilova, 2020; Suomalainen et al., 2013; Thamm et al., 2013) |
Com a tecnologia multidisciplinària i polivalent a l'agricultura, els drons s'han investigat des de diverses perspectives. Per exemple, els estudiosos han examinat les aplicacions de drons a l'agricultura (Kulbacki et al., 2018; Mogili i Deepak, 2018), la seva contribució a l'agricultura de precisió (Puri et al., 2017; Tsouros et al., 2019), la seva complementarietat amb altres tecnologies d'avantguarda (Al-Thani et al., 2020; Dutta i Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018) i les possibilitats d'avançar en les seves capacitats de navegació i detecció (Bareth et al. , 2015; Suomalainen et al., 2014). Atès que la investigació sobre les aplicacions de drons a l'agricultura ha esdevingut freqüent (Khan et al., 2021)), cal resumir la literatura existent i revelar l'estructura intel·lectual del domini. A més, com a camp d'alta tecnologia amb millores contínues, cal fer revisions estructurades per resumir periòdicament la literatura existent i identificar llacunes importants en la recerca. A
A la data, hi ha poques ressenyes que discuteixen les aplicacions de drons al sector agrícola. Per exemple, Mogili i Deepak (2018) revisen breument les implicacions dels drons per al seguiment de cultius i la polvorització de pesticides. Inoue (2020) realitza una revisió de l'ús de satèl·lits i drons en teledetecció a l'agricultura. L'autor explora els reptes tecnològics de l'adopció de l'agricultura intel·ligent i les contribucions de satèl·lits i drons a partir d'estudis de casos i bones pràctiques. Tsouros et al. (2019) resumeixen diferents tipus de drons i les seves principals aplicacions a l'agricultura, destacant diversos mètodes d'adquisició i processament de dades. Més recentment, Aslan et al. (2022) van realitzar una revisió exhaustiva de les aplicacions d'UAV en activitats agrícoles i van subratllar la rellevància de la localització i el mapeig simultània d'un UAV a l'hivernacle. Díaz-Gonzalez et al. (2022) van revisar estudis recents sobre la producció de rendiments de cultius basats en diferents tècniques d'aprenentatge automàtic i a distància
sistemes de detecció. Les seves troballes van indicar que els UAV són útils per estimar els indicadors del sòl i superar els sistemes de satèl·lit en termes de resolució espacial, temporalitat de la informació i flexibilitat. Basiri et al. (2022) van fer una revisió exhaustiva dels diferents enfocaments i mètodes per superar els reptes de planificació de rutes per als UAV multirotor en el context de l'agricultura de precisió. A més, Awais et al. (2022) van resumir l'aplicació de dades de teledetecció d'UAV als cultius per estimar l'estat de l'aigua i van proporcionar una síntesi en profunditat de la capacitat prospectiva de la teledetecció d'UAV per a l'aplicació de l'estrès dels residus. Finalment, Aquilani et al. (2022) van revisar les tecnologies d'agricultura de previsió aplicades en sistemes ramaders basats en pastures i van deduir que la teledetecció activada pels UAV és avantatjosa per a l'avaluació de la biomassa i la gestió del ramat.
A més, recentment s'han informat esforços per utilitzar els UAV en el seguiment, el seguiment i la recollida de bestiar.
Tot i que aquestes revisions aporten coneixements nous i importants, no es pot trobar cap revisió exhaustiva i actualitzada basada en bibliometria a la literatura, que presenta un clar buit de coneixement. A més, s'ha afirmat que quan la producció acadèmica creix en un domini científic, esdevé vital que els investigadors utilitzin enfocaments de revisió quantitativa per comprendre l'estructura del coneixement del domini (Rivera i Pizam, 2015). De la mateixa manera, Ferreira et al. (2014) van argumentar que a mesura que els camps de recerca maduren i es tornen complexos, els estudiosos haurien d'intentar donar sentit ocasionalment al coneixement generat i acumulat per revelar noves contribucions, captar tradicions i tendències de recerca, identificar quins temes s'estudien i aprofundir en l'estructura del coneixement de el camp i les possibles direccions de recerca. Mentre que Raparelli i Bajocco (2019) van realitzar una anàlisi bibliomètrica per examinar el domini de coneixement de les aplicacions de drons en agricultura i silvicultura, el seu estudi només considera investigacions acadèmiques publicades entre 1995 i 2017, que no reflecteixen la dinàmica d'aquesta àrea en moviment ràpid. A més, els autors no van intentar identificar les contribucions més influents en el camp, agrupar la literatura i avaluar l'estructura intel·lectual mitjançant l'anàlisi de co-citació. Com a resultat, cal resumir la literatura per revelar els focus, les tendències i els punts de recerca actuals.
Per cobrir aquest buit de coneixement, aprofitem la metodologia quantitativa i els mètodes bibliomètrics rigorosos per examinar l'estat actual de la investigació a la intersecció dels drons i l'agricultura. Argumentem que l'estudi actual fa diverses contribucions a la literatura existent examinant una tecnologia emergent que és molt necessària en l'agricultura, ja que ofereix un gran potencial per alterar diversos aspectes d'aquest sector. La necessitat d'una anàlisi bibliomètrica dels drons agrícoles es percep encara més donat el coneixement dispers i fragmentat sobre els drons en el context agrícola. De la mateixa manera, cal agrupar sistemàticament la literatura relativa als drons agrícoles, tenint en compte els estudis més influents que construeixen les bases d'aquest camp de recerca. El mèrit de l'anàlisi també inclou l'aclariment dels principals temes de recerca representats a la literatura. Tenint en compte el potencial de transformació de la tecnologia, postulem que una anàlisi profunda de la xarxa proporciona nous coneixements mitjançant la determinació d'obres influents i la revelació de temes sobre el potencial dels drons per a l'agricultura.
Per tant, ens esforcem per assolir els següents objectius de recerca:
- Identificació de publicacions influents amb contribucions destacades a les aplicacions de drons en l'àmbit de l'agricultura.
- Agrupació de la literatura, identificació de focus d'investigació i mapeig dels principals estudis d'"estructura intel·lectual" basats en la similitud semàntica mitjançant l'anàlisi de co-citació.
- Comprensió de l'evolució dels enllaços i xarxes de cites al llarg del temps entre diverses publicacions en el camp i identificació de futures direccions de recerca i temes candents.
La resta del treball s'estructura de la següent manera: l'apartat 2 descriu la metodologia i els passos de recollida de dades; l'apartat 3 ofereix els resultats de les anàlisis; i la secció 4 analitza les troballes i conclou amb contribucions de recerca, implicacions i direccions futures.
Metodologia
En aquest estudi de recerca actual, realitzem una anàlisi bibliomètrica per explorar les aplicacions dels drons a l'agricultura. Aquest enfocament quantitatiu revela l'estructura intel·lectual del domini del coneixement (Arora i Chakraborty, 2021) i l'estat actual, els temes candents i les direccions de recerca futures que es poden investigar aplicant aquest mètode (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020). En general, una anàlisi bibliomètrica examina la literatura existent per resumir i descobrir patrons ocults de comunicació escrita i l'evolució de la disciplina basada en estadístiques i mètodes matemàtics, i s'aplica a grans conjunts de dades (Pritchard, 1969; Small, 1999; Tahai i Rigsby). , 1998). Mitjançant l'ús de la bibliometria, aspirem a entendre millor els paradigmes existents i els focus de recerca que contribueixen al domini basant-nos en la similitud (Thelwall, 2008). La bibliometria proporciona nous coneixements recolzats per la força quantitativa objectiva de la metodologia (Casillas i Acedo, 2007). Nombrosos estudiosos han realitzat anteriorment estudis bibliomètrics en dominis relacionats, com ara l'agricultura, la teledetecció i la transformació digital (Armenta-Medina et al., 2020; Bouzembrak et al., 2019; A. Rejeb, Treiblmaier, et al., 2021; Wamba & Queiroz, 2021; Wang et al., 2019).
Anàlisi de citacions
L'anàlisi de cites revela diferents coneixements sobre un camp de recerca determinat. En primer lloc, ajuda a revelar els autors i publicacions més influents que contribueixen a un determinat camp de recerca i tenen un impacte significatiu (Gundolf & Filser, 2013). En segon lloc, es poden descobrir el flux de coneixement i els vincles de comunicació entre autors. Finalment, traçant els vincles entre obres citades i citades, es poden explorar els canvis i l'evolució d'un domini de coneixement al llarg del temps (Pournader).
et al., 2020). Els nombres elevats de citacions d'una publicació reflecteixen la seva rellevància i contribucions substancials al domini de la recerca (Baldi, 1998; Gundolf i Filser, 2013; Marinko, 1998). L'anàlisi de citacions de publicacions també ajuda a identificar les obres rellevants i fer un seguiment de la seva popularitat i progrés al llarg del temps.
Anàlisi de cocitació de documents
L'anàlisi de cocitacions és un mètode valuós per explorar les relacions entre publicacions i representar l'estructura intel·lectual d'un camp (Nerur et al., 2008). En altres paraules, en identificar les publicacions més citades i les seves connexions, el mètode agrupa les publicacions en diferents grups de recerca on les publicacions d'un clúster comparteixen regularment idees similars (McCain, 1990; Small, 1973). És crucial esmentar que la similitud no vol dir que les conclusions de les publicacions ho siguin
cohesionar i estar d'acord entre ells; les publicacions pertanyen al mateix clúster a causa de la similitud de temes, però poden tenir punts de vista contradictoris.
Recopilació i anàlisi de dades
Seguint la metodologia proposada per White i Griffith (1981), vam realitzar una cerca exhaustiva d'articles de revistes per cobrir tot el domini de recerca de les aplicacions de drons a l'agricultura, seguint els cinc passos següents:
- El primer pas va ser la recollida de dades. Scopus va ser seleccionada com una de les bases de dades més completes i fiables amb resultats estandarditzats. Es van recuperar les metadades de publicacions relacionades amb totes les aplicacions de drons a l'agricultura. Després vam analitzar els articles seleccionats, eliminant els articles fora de tema de l'anàlisi.
- Hem analitzat la literatura i hem identificat les paraules clau més importants utilitzades en l'àrea de recerca.
- Mitjançant l'anàlisi de cites, hem explorat la connexió entre autors i documents per revelar patrons de cites subjacents. També vam identificar els autors i publicacions més influents amb contribucions significatives al camp dels drons agrícoles.
- Hem realitzat una anàlisi de co-citació per agrupar publicacions similars en grups.
- Finalment, hem analitzat les connexions i vincles entre països, institucions i revistes per descriure la xarxa de col·laboració.
Identificació dels termes de cerca adequats
Hem aplicat les següents cadenes de cerca per a l'agregació de dades: (drone* O "vehicle aeri no tripulat" O uav* O "sistema d'avions no tripulats"” O uas O “avió pilotat a distància”) I (agricultura O agricultura O ramadera O pagès). La cerca es va dur a terme el setembre de 2021. Els drons tenen diverses designacions, com ara UAV, UAS i avions pilotats de forma remota (Sah et al., 2021). Els termes de cerca específics relacionats amb l'agricultura es van identificar a partir de l'estudi d'Abdollahi et al. (2021). Per motius de claredat i transparència, la consulta exacta que hem utilitzat es mostra a l'Apèndix 1. Després d'un procés de neteja de dades, vam crear un fitxer de text que es va carregar posteriorment a BibExcel, una eina comuna per a l'anàlisi de cites i cocitacions. Aquesta eina també ofereix una interacció senzilla amb altres programaris i ofereix un grau significatiu de llibertat en el maneig i l'anàlisi de dades. Es va utilitzar la versió 1.6.16 de VOSviewer per visualitzar les troballes i generar les xarxes bibliomètriques (Eck i Waltman, 2009). VOSviewer ofereix una gamma de visualització intuïtiva, especialment per analitzar mapes bibliomètrics (Geng et al., 2020). A més, ajuda a proporcionar resultats visuals senzills que ajuden a comprendre millor els resultats (Abdollahi et al., 2021). Aplicant les cadenes de cerca tal com s'ha indicat anteriorment, vam reunir i emmagatzemar totes les publicacions rellevants. Els primers resultats de la cerca van donar un total de 5,085 documents. Per garantir la qualitat de la mostra seleccionada, només es van considerar articles de revistes revisades per parells a la investigació, cosa que va provocar l'exclusió d'altres tipus de documents, com ara llibres, capítols, actes de conferències i notes editorials. Durant un procés de selecció, es van filtrar les publicacions irrellevants (és a dir, fora de l'àmbit d'aquest treball), redundants (és a dir, duplicats originats a partir de la doble indexació) i les publicacions que no parlaven anglès. Aquest procés va donar lloc a la inclusió de 4,700 documents en l'anàlisi final.
Descobriments i discussió
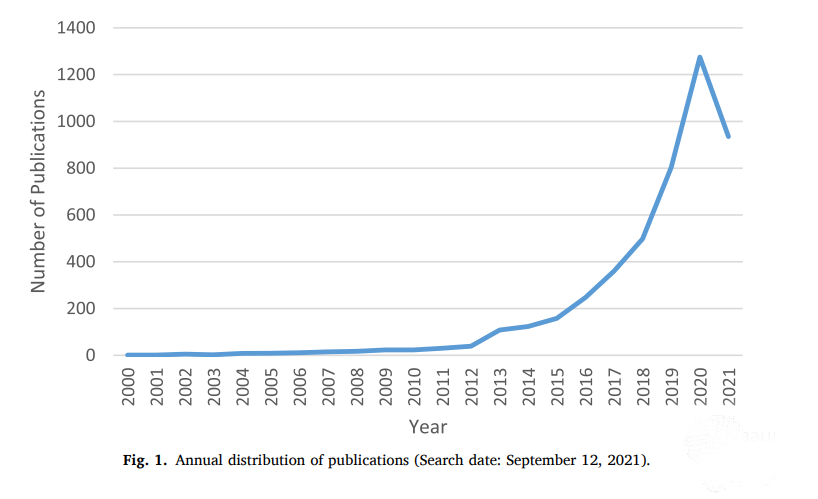
Per començar, hem analitzat l'evolució de la producció de publicacions a la literatura actual sobre drons agrícoles. La distribució temporal de la investigació acadèmica es mostra a la figura 1. Veiem un ràpid augment de publicacions a partir de l'any 2011 (30 publicacions); per tant, vam decidir dividir el període d'anàlisi en dues etapes diferents. Ens referim al període comprès entre 1990 i 2010 com l'etapa de construcció, que tenia aproximadament set articles publicats anualment. El període posterior al 2010 s'ha anomenat l'etapa de creixement ja que la investigació sobre les aplicacions de drons a l'agricultura va presenciar un augment exponencial durant aquest període. Després del 2010, el creixent nombre de publicacions confirma l'interès creixent entre els investigadors, que també reflecteix que els drons s'han aplicat a la teledetecció i s'han utilitzat en agricultura de precisió (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020). ). Concretament, el nombre de publicacions va passar de 108 el 2013 a 498 el 2018 i va assolir un màxim de 1,275 el 2020. Entre gener i mitjans de setembre de 935 es van publicar un total de 2021 articles. Posteriorment, vam optar per centrar més la nostra anàlisi en l'etapa de creixement. ja que aquest període reflecteix les subtileses més recents i importants dels drons agrícoles.
Anàlisi de paraules clau
Les paraules clau que seleccionen els autors per a una publicació tenen un impacte crucial en com es representa el document i com es comunica a les comunitats científiques. Identifiquen els temes clau de la investigació i determinen el seu potencial per prosperar o fracassar (Day i Gastel, 1998; Kim et al., 2016; Uddin et al., 2015). L'anàlisi de paraules clau, una eina per revelar tendències i direccions de recerca més àmplies, es refereix a la compilació de les paraules clau de totes les publicacions relacionades en un domini (Dixit i Jakhar, 2021). En l'estudi actual, vam dividir les paraules clau agregades en dos conjunts (és a dir, fins al 2010 i el 2011-2021) per explorar els temes més populars. D'aquesta manera, podem rastrejar les paraules clau crucials dels dos conjunts i assegurar-nos que hem capturat totes les dades necessàries. Per a cada conjunt, les deu paraules clau principals es presenten a la taula 3. Hem eliminat les inconsistències combinant paraules clau semànticament idèntiques, com ara "drone" i "drones" o, de manera similar, "Internet de les coses" i "IoT".
La taula 3 mostra que "vehicle aeri no tripulat" és una paraula clau utilitzada amb més freqüència en comparació amb "drone" i "sistema aeri no tripulat" en ambdós períodes de temps. A més, "teledetecció", "agricultura de precisió" i "agricultura" estan molt classificats en ambdós períodes. En el primer període, l'"agricultura de precisió" va ocupar el cinquè lloc, i en el segon període va ocupar el segon lloc, cosa que il·lustra com els drons són cada cop més importants per aconseguir l'agricultura de precisió, ja que poden fer un seguiment.
pràctiques de detecció i estimació més ràpides, més barates i més fàcils de realitzar en comparació amb altres sistemes de teledetecció i terrestres. A més, poden ruixar la quantitat precisa d'entrada (per exemple, aigua o pesticides) quan sigui necessari (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
Llista de les paraules clau més utilitzades.
Rank | 1990-2010 | Núm. De ocurrències | 2011-2021 | Núm. De ocurrències |
| 1 | aèria no tripulada vehicle | 28 | sense tripulació vehicle aeri | 1628 |
| 2 | teledetecció | 7 | precisió agricultura | 489 |
| 3 | agricultura | 4 | teledetecció | 399 |
| 4 | aerotransportat | 4 | abellot | 374 |
| 5 | precisió agricultura | 4 | sense tripulació sistema aeri | 271 |
| 6 | aèria no tripulada | 4 | agricultura | 177 |
| 7 | hiperespectral sensor | 3 | aprenentatge profund | 151 |
| 8 | neuronal artificial xarxes | 2 | màquina aprenentatge | 149 |
| 9 | vol autònom | 2 | vegetació Index | 142 |
| 10 | cafè | 2 | Internet de Coses | 124 |
Una altra característica interessant és la presència de tecnologies complementàries. En la primera etapa, "Sensor hiperespectral" i "xarxes neuronals artificials" (ANN) es troben entre les deu paraules clau principals. La imatge hiperespectral va revolucionar la imatge tradicional en recopilar un gran nombre d'imatges a diferents longituds d'ona. En fer-ho, els sensors poden recollir simultàniament una millor informació espacial i espectral en comparació amb la imatge multiespectral, l'espectroscòpia i la imatge RGB (Adao ˜ et al.,
2017). L'aparició de "ANN" en la primera etapa i "aprenentatge profund" (DL) i "aprenentatge automàtic" (ML) en la segona implica que la majoria dels treballs publicats es van centrar en l'examen del potencial de les tècniques d'IA per a drones. agricultura basada. Tot i que els drons són capaços de volar de manera autònoma, encara requereixen la participació d'un pilot, la qual cosa implica un baix nivell d'intel·ligència del dispositiu. Tanmateix, aquest problema es pot resoldre gràcies a l'avenç de les tècniques d'IA, que poden proporcionar una millor consciència de la situació i un suport autònom per a la presa de decisions. Equipats amb IA, els drons poden evitar col·lisions durant la navegació, millorar la gestió del sòl i dels cultius (Inoue, 2020) i reduir la mà d'obra i l'estrès dels éssers humans (BK Sharma et al., 2019).
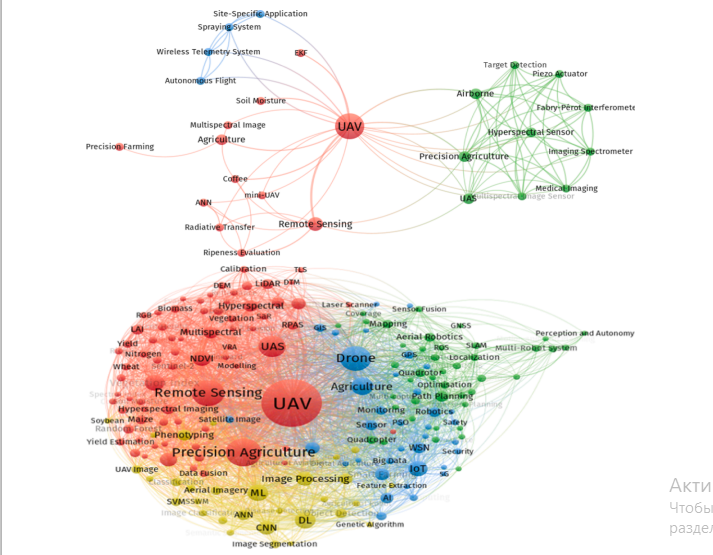
A causa de la seva flexibilitat i capacitat per manejar grans quantitats de dades no lineals, les tècniques d'IA són mètodes adequats per analitzar les dades transmeses pels drons i altres sistemes de teledetecció i terrestres per a la predicció i la presa de decisions (Ali et al., 2015; Inoue, 2020). A més, la presència de "IoT" en el segon període indica el seu paper emergent en l'agricultura. IoT està revolucionant l'agricultura interconnectant altres tecnologies, com ara drons, ML, DL, WSN i big data. Un dels avantatges clau d'implementar IoT és la seva capacitat per combinar de manera eficient i eficaç diverses tasques (adquisició de dades, anàlisi i processament de dades, presa de decisions i implementació) gairebé en temps real (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). A més, els drons es consideren eines eficients per capturar les dades necessàries per calcular el vigor i les propietats de la vegetació (Candiago et al., 2015). Les figures 2a i 2b il·lustren les xarxes de co-ocurrència de paraules clau per als dos períodes de temps.
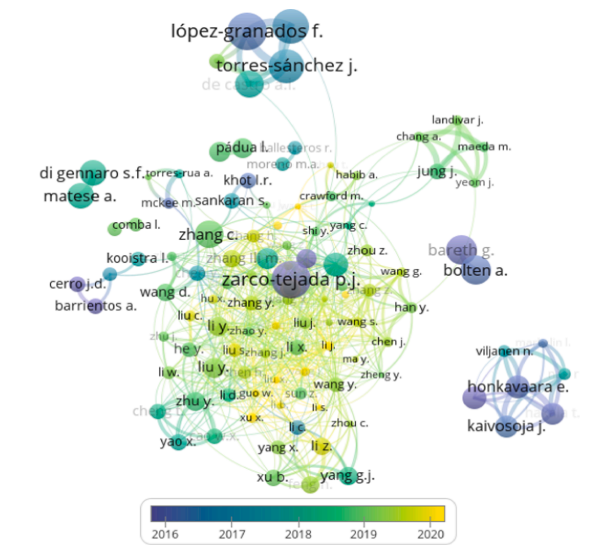
Autors influents
En aquesta secció, determinem els autors influents i examinem com les xarxes de citacions d'autors poden visualitzar i organitzar la literatura actual. La figura 3 mostra la superposició cronològica de tots els investigadors amb el major nombre de citacions. L'escala de colors reflecteix la variació anual de les cites dels autors. Examinem l'estructura de cites dels investigadors que van publicar estudis sobre drons agrícoles utilitzant un llindar d'un mínim de 50 cites i deu publicacions. Fora de
12,891 autors, només 115 complien aquesta condició. La taula 4 enumera els deu autors més influents, ordenats pel nombre màxim de citacions. López- Granados F. lidera la llista amb 1,963 citacions, seguit de Zarco-Tejada PJ amb 1,909 citacions.
Llista dels autors més citats.
| Classificació | autor | Citacions |
| 1 | López-Granados 'F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S´ tambéz J. | 1,576 |
| 5 | Fereres E | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
Quan es tracta de publicacions individuals, l'article de Zhang i Kovacs (2012) ha estat l'estudi més citat publicat a Precision Agriculture. Aquí, els autors van revisar l'aplicació dels UAS en l'agricultura de precisió. Els resultats de la seva investigació suggereixen que cal avançar en el disseny de la plataforma, la producció, l'estandardització de la georeferenciació d'imatges i el flux de treball de recuperació d'informació per oferir als agricultors productes finals fiables. A més, recomanen implicar més fortament l'agricultor, especialment en la planificació del camp, la captura d'imatges, així com la interpretació i anàlisi de dades. És important destacar que aquest estudi va ser un dels primers a mostrar la importància de l'UAV en la cartografia de camp, la cartografia de vigor, la mesura del contingut químic, el seguiment de l'estrès de la vegetació i l'avaluació dels efectes dels fertilitzants sobre el creixement de les plantes. Els reptes relacionats amb la tecnologia també inclouen costos prohibitius, capacitat del sensor, estabilitat i fiabilitat de la plataforma, manca d'estandardització i procediment coherent per analitzar quantitats massives de dades.
Anàlisi de citacions
L'anàlisi de cites representa l'estudi de la influència dels articles, encara que propensos als fluxos (per exemple, biaix de citació, autocitació) es considera un dels instruments estàndard per a l'avaluació d'impacte (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al., 2010). Les citacions també reflecteixen la importància i la vitalitat de les contribucions dels articles a la literatura sobre un tema concret (R. Sharma et al., 2022). Hem realitzat una anàlisi de cites per determinar els estudis més influents sobre drons agrícoles i hem resumit els continguts. La taula 5 presenta la llista dels quinze articles més influents per als períodes 1990–2010 i 2011–2021. Els articles de Berni et al. (2009)b i Austin (2010) han estat els més citats durant els anys 1990 i 2010, amb 831 i 498 citacions, respectivament. Berni et al. (2009)b va il·lustrar el potencial de desenvolupar productes quantitatius de teledetecció mitjançant un UAV basat en helicòpters equipat amb sensors d'imatge multiespectrals tèrmics i de banda estreta assequibles. En comparació amb els sensors aerotransportats tripulats tradicionals, un sistema d'UAV de baix cost per a l'agricultura és capaç d'aconseguir estimacions comparables dels paràmetres biofísics dels cultius, si no millors. El cost assequible i la flexibilitat operativa, juntament amb les altes resolucions espectrals, espacials i temporals disponibles en un temps de resposta ràpid, fan que els UAV siguin adequats per a una sèrie d'aplicacions que requereixen una gestió crítica del temps, inclosa la programació del reg i l'agricultura de precisió. El document de Berni et al. (2009)b és molt citat perquè va integrar eficaçment una plataforma d'ala giratòria no tripulada i sensors digitals i tèrmics amb els mecanismes de calibratge necessaris per a aplicacions agrícoles. La segona publicació més citada és un llibre escrit per Austin (2010), que va parlar dels UAV des de les perspectives de disseny, desenvolupament i desplegament. A l'agricultura, els vehicles no tripulats donen suport al seguiment dels cultius mitjançant la detecció precoç de malalties mitjançant els canvis de color dels cultius, facilitant la sembra i la polvorització dels cultius i el seguiment i la conducció de ramats.
Els estudis de Sullivan et al. (2007), Lumme et al. (2008), i Gokto ¨ ǧan et al. (2010) acaben la llista dels quinze articles més citats. Aquests articles il·lustren el desenvolupament de sistemes basats en UAV per donar suport a l'agricultura. Ofereixen solucions a diversos problemes, com ara el seguiment i l'escaneig de cultius, la vigilància i gestió de les males herbes i el suport a la presa de decisions. També suggereixen i discuteixen la capacitat de l'UAV per augmentar l'eficiència del mostreig i ajudar els agricultors a dissenyar una idea precisa i eficaç.
estratègies de plantació. Dos articles van ser autors de Berni (Berni et al., 2009b; Berni et al., 2009a), que subratllen el seu impacte significatiu en la investigació relacionada amb els drons agrícoles. El document de Zarco-Tejada et al. (2014) ha estat un dels estudis pioners per il·lustrar la necessitat d'utilitzar imatges d'UAV de baix cost en la quantificació de l'alçada dels arbres.
Llistat de les publicacions més citades.
| Rank | De 1990 a 2010 | De 2011 a 2021 | ||
| Document | Citació | Document | Citació | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang i Kovacs, 2012) | 967 |
| 2 | (Austin, 2010) | 498 | (Nex i Remondino, 2014) | 893 |
| 3 | (Hunt et al., 2010) | 331 | (Floreano i Wood, 2015) | 552 |
| 4 | (SR Herwitz et al., 2004) | 285 | (Hossein Motlagh et al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (Shakhatreh et al., 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (Honkavaara et al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang i Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
En el segon període (2011-2021), les investigacions de Zhang i Kovacs (2012) i Nex i Remondino (2014) van donar lloc a les publicacions més citades. Zhang i Kovacs (2012) argumenten que l'agricultura de precisió podria beneficiar-se de la implementació de tècniques i sensors geoespacials, com ara sistemes d'informació geogràfica, GPS i teledetecció, per capturar variacions en el camp i gestionar-les mitjançant l'ús d'estratègies alternatives. Com a canviador de jocs en l'agricultura de precisió, l'adopció dels drons ha anunciat una nova era en la teledetecció, simplificant l'observació aèria, capturant dades de creixement dels cultius, condicions del sòl i zones de polvorització. La revisió de Zhang i Kovacs (2012) és fonamental, ja que ofereix informació sobre els drones al revelar els usos i els reptes existents d'aquests dispositius en el monitoratge ambiental i l'agricultura de precisió, com ara les limitacions de la plataforma i la càmera, els reptes del processament de dades, la participació dels agricultors i les regulacions d'aviació. . El segon
L'estudi més citat de Nex i Remondino (2014) va revisar l'estat de l'art dels UAV per capturar, processar i analitzar imatges terrestres.
El seu treball també va presentar una visió general de diverses plataformes, aplicacions i casos d'ús d'UAV, mostrant els nous avenços en el processament d'imatges d'UAV. A l'agricultura, els agricultors podrien utilitzar els UAV per prendre decisions efectives per aconseguir estalvis de costos i temps, rebre un registre ràpid i precís dels danys i anticipar possibles problemes. A diferència de les plataformes aèries convencionals, els drones poden reduir les despeses operatives i disminuir el perill d'accés en llocs difícils tot conservant el potencial d'alta precisió. El seu article resumeix diversos avantatges dels UAV, especialment en termes de precisió i resolució.
Entre les tretze publicacions més citades restants entre el 2011 i el 2021, vam observar una major concentració en la investigació relacionada amb aplicacions de drons en missions d'imatge (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014) , agricultura de precisió (Candiago et al., 2015; Honkavaara et al., 2013a), viticultura de precisió (Matese et al., 2015), avaluació de l'estrès hídric (Gago et al., 2015) i seguiment de la vegetació (Aasen et al., 2015). , XNUMXa). En els primers anys, els investigadors es van centrar
més sobre el desenvolupament de sistemes d'UAV de baix cost, lleugers i precisos per a l'agricultura; investigacions més recents s'han centrat més en les revisions d'aplicacions d'UAV per a l'agricultura i l'enquesta de camp. En resum, aquesta anàlisi revela que les publicacions influents han proporcionat sobretot revisions d'estudis previs per avaluar l'estat científic i tecnològic actual dels UAV i han desenvolupat sistemes UAV per donar suport a l'agricultura de precisió. Curiosament, no hem trobat estudis que utilitzessin empírics
metodologies o estudis de casos descriptius, la qual cosa constitueix un important buit de coneixement i demana més investigació sobre aquest tema.
Anàlisi de co-citació
Segons Gmür (2006), l'anàlisi de cocitacions identifica publicacions similars i les agrupa. Un examen atent d'un clúster pot revelar un camp de recerca comú entre les publicacions. Investiguem la cocitació de la literatura relacionada amb els drons agrícoles per il·lustrar àrees temàtiques relacionades i detectar els patrons intel·lectuals de les publicacions. En aquest sentit, Small (1973) va recomanar l'ús de l'anàlisi de cocitació per estudiar les investigacions més influents i fonamentals.
dins d'una disciplina. Per limitar el conjunt als articles més destacats (Goyal i Kumar, 2021), vam establir un llindar de cocitació de 25, és a dir, dos articles s'han d'haver citat junts a les llistes de referències de 25 o més publicacions diferents. La agrupació també es va dur a terme amb una mida mínima de clúster 1 i sense cap mètode per fusionar clústers més petits amb els més grans. Com a resultat, es van generar sis clústers basats en la similitud dels estudis i la seva estructura intel·lectual. La taula 6 mostra la distribució de les publicacions a cada clúster.
Clúster 1: aquest clúster conté divuit documents publicats després de. Les publicacions d'aquest clúster discuteixen el paper dels drons en el suport a la vigilància ambiental, la gestió dels cultius i la gestió de les males herbes. Per exemple, Manfreda et al. (2018) ofereixen una visió general de la investigació i implementacions actuals d'UAV en el seguiment dels ecosistemes agrícoles naturals i argumenten que la tecnologia ofereix un potencial enorme per millorar dràsticament el seguiment ambiental i reduir
la bretxa existent entre l'observació de camp i la teledetecció convencional aèria i espacial. Això es pot fer oferint una nova capacitat per millorar la recuperació temporal i la visió espacial de grans àrees d'una manera assequible. Els drones poden detectar constantment l'entorn i enviar les dades resultants a entitats intel·ligents, centralitzades/descentralitzades que controlen sensors per identificar problemes eventuals, com ara la manca de malalties o la detecció d'aigua (Pàdua ´ et al., 2017). Adao ˜ et al. (2017) plantegen que els UAV són ideals per avaluar les condicions de les plantes mitjançant la captura d'un gran volum de dades brutes relacionades amb l'estat de l'aigua, l'estimació de la biomassa i l'avaluació del vigor. Els sensors muntats en UAV també es podrien desplegar ràpidament en condicions ambientals adequades per permetre la captura oportuna de dades de teledetecció (Von Bueren et al., 2015). Mitjançant els vehicles no tripulats, els agricultors poden dur a terme activitats agrícoles en interiors mitjançant l'adquisició de mesures des de pràcticament qualsevol lloc de l'espai tridimensional dels entorns agrícoles interiors (per exemple, hivernacles), garantint així el control del clima local i el seguiment de les plantes (Roldan ´ et al. ., 2015). En el context de la precisió
agricultura, les decisions de gestió de cultius necessiten dades de cultius precises i fiables amb una resolució temporal i espacial adequada (Gebbers i Adamchuk, 2010; Gevaert et al., 2015; Maes i Steppe, 2019). Per aquest motiu, Agüera Vega et al. (2015) van utilitzar un sistema de sensor multiespectral muntat en UAV per adquirir imatges d'un cultiu de gira-sol durant la temporada de creixement. De la mateixa manera, Huang et al. (2009) assenyalen que la teledetecció basada en UAV podria facilitar el mesurament de cultius i sòls a partir de les dades espectrals recollides. Verger et al. (2014) van desenvolupar i van provar una tècnica per estimar un índex d'àrea verda (GAI) a partir de mesures de reflectància d'UAV en aplicacions d'agricultura de precisió, centrada en els cultius de blat i colza. Per tant, els drons ofereixen noves possibilitats per recuperar la informació de l'estat del cultiu amb revisions freqüents i una alta resolució espacial (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
Agrupació de publicacions influents sobre drons agrícoles.
| Cluster | Tema ampli | referències |
| 1 | Seguiment ambiental, cultiu gestió, gestió de males herbes | (Ad˜ ao et al., 2017; Agüera Vega et al., 2015; de Castro et al., 2018; Gómez-Cand ´ on ´ et al., 2014; YB Huang et al., 2013; Khanal et al., 2017; López-Granados, ´ 2011; Manfreda et al., 2018; P´ adua et al., 2017; Pena ˜ et al., 2013; Pérez-Ortiz et al., 2015; Rasmussen et al., 2013, 2016; Torres-S´ anchez et al., 2014; Torres-Sanchez, ´ Lopez-Granados, ´ & Pena, ˜ 2015; Verger et al., 2014; Von Bueren et al., 2015; C. Zhang i Kovacs, 2012) |
| 2 | Fenotipat remot, rendiment estimació, model de superfície de cultiu, recompte de plantes | (Bendig et al., 2013, 2014; Geipel et al., 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab et al., 2016; Holman et al., 2016; Jin et al., 2017; W. Li et al., 2016; Maimaitijiang et al., 2017; Sankaran et al., 2015; Schirrmann et al., 2016; Shi et al., 2016; Yue et al., 2017; X. Zhou et al., 2017) |
| 3 | Imatge tèrmica per a l'aigua, imatge multiespectral | (Baluja et al., 2012; Berni et al., 2009b; Berni et al., 2009a; Candiago et al., 2015; Gago et al., 2015; González-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; Khaliq et al., 2019; Matese et al., 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | Imatge hipersectral, espectral imatges | (Aasen et al., 2015a; Bareth et al., 2015; Hakala et al., 2013; Honkavaara et al., 2013a; Lucieer et al., 2014; Saari et al., 2011; Suomalainen et al., 2014) |
| 5 | Aplicacions de mapeig 3D | (Jim´enez-Brenes et al., 2017; Nex & Remondino, 2014; Salamí et al., 2014; Torres-S´ anchez, López- ´ Granados, Serrano, et al., 2015; Zahawi et al., 2015; Zarco-Tejada et al., 2014) |
| 6 | Vigilància agrícola | (SR Herwitz et al., 2004; Hunt et al., 2010; CCD Lelong et al., 2008; Primicerio et al., 2012; Xiang i Tian, 2011) |
A més, els drons són útils per a tasques difícils en l'agricultura, inclosa la cartografia de males herbes. Les imatges capturades pels dispositius han demostrat la seva utilitat per a la detecció precoç de males herbes als camps (de Castro et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; 2021; Rozenberg et al., 2018). En aquest sentit, de Castro et al. (2013) plantegen que la fusió de les imatges d'UAV i l'anàlisi d'imatges basades en objectes (OBIA) ha permès als professionals superar el problema de l'automatització de la detecció precoç dels cultius de pastures de principis de temporada, que és un gran pas endavant en la investigació de males herbes. Així mateix, Pena ˜ et al. (2020) assenyalen que l'ús d'imatges d'ultra alta resolució espacial d'UAV juntament amb un procediment OBIA permet generar mapes de males herbes en els primers cultius de blat de moro que es podrien utilitzar per planificar la implementació de mesures de control de males herbes durant la temporada. una tasca més enllà de la capacitat de les imatges de satèl·lit i tradicionals en l'aire. En comparació amb els algorismes de classificació d'imatges o detecció d'objectes, les tècniques de segmentació semàntica són més efectives en les tasques de mapeig de males herbes (J. Deng et al., 2020), permetent així als agricultors detectar les condicions del camp, mitigar les pèrdues i millorar els rendiments durant la temporada de creixement (Ramesh). et al., 2020). La segmentació semàntica basada en l'aprenentatge profund també pot proporcionar una mesura precisa de la coberta vegetal a partir d'imatges aèries d'alta resolució (Ramesh et al., 2022; A. Zheng et al., XNUMX). Malgrat el seu potencial per a distància
classificació de píxels de detecció, les tècniques de segmentació semàntica requereixen un càlcul important i una memòria GPU prohibitiva (J. Deng et al., 2020).
Basat en l'aprenentatge automàtic i UAV, P´erez-Ortiz et al. (2015) van suggerir un enfocament de cartografia de males herbes per proporcionar estratègies de control de males herbes específiques del lloc quan els agricultors adopten el control de males herbes després de l'emergència. Finalment, Rasmussen et al. (2013) van destacar que els drons proporcionen detecció barata amb una gran flexibilitat de resolució espacial. En general, les publicacions d'aquest clúster se centren a explorar els potencials dels UAV per donar suport a la teledetecció, el seguiment de cultius i el mapeig de males herbes. Es necessiten investigacions addicionals en profunditat per investigar encara més com les aplicacions de drons en el seguiment ambiental, la gestió de cultius i el cartografia de males herbes poden aconseguir una agricultura més sostenible (Chamuah i Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018) i aborden els problemes de governança d'aquesta tecnologia en aplicacions d'assegurances de cultius (Basnet i Bang, 2018; Chamuah i Singh, 2019, 2022; Meinen i Robinson, 2021). Els investigadors haurien de concentrar-se a validar les mesures recollides amb UAV amb tècniques de processament eficients per millorar la qualitat màxima de les dades processades (Manfreda et al., 2018). A més, cal desenvolupar algorismes adequats que reconeguin els píxels que mostren males herbes a les imatges digitals i eliminen el fons irrellevant durant el mapeig de males herbes UAV (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; López- ´ Granados et al., 2016). Es benvinguda investigació addicional sobre l'adopció de tècniques de segmentació semàntica en el reconeixement de plantes, la classificació de les fulles i el mapeig de malalties (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
Clúster 2. Les publicacions d'aquest clúster es van centrar en diversos aspectes dels drons agrícoles. Relacionat amb el fenotipat remot, Sankaran et al. (2015) van revisar el potencial d'utilitzar imatges aèries d'alta resolució i baixa altitud amb UAV per a la fenotipació ràpida de cultius al camp, i argumenten que, en comparació amb les plataformes de detecció a terra, els UAV petits amb sensors adequats ofereixen diversos avantatges. , com ara un accés més fàcil al camp, dades d'alta resolució, recollida eficient de dades,
avaluacions ràpides de les condicions de creixement del camp i baixos costos operatius. Tanmateix, els autors també assenyalen que l'aplicació eficaç d'UAV per al fenotipat de camp es basa en dos elements fonamentals, a saber, les característiques d'UAV (per exemple, seguretat, estabilitat, posicionament, autonomia) i les característiques del sensor (per exemple, resolució, pes, longituds d'ona espectrals, camp). de vista). Haghighattalab et al. (2016) van proposar un pipeline de processament d'imatges semi-automatitzat per recuperar dades a nivell de trama de les imatges d'UAV i accelerar el procés de reproducció. Holman et al. (2016) van desenvolupar un alt
sistema de fenotipat de camp de rendiment i va destacar que el UAV és capaç de recollir dades fenotípiques de qualitat, voluminoses i basades en el camp, i que el dispositiu és eficaç per a grans àrees i en diferents ubicacions de camp.
Com que l'estimació del rendiment és una informació increïblement vital, sobretot quan està disponible a temps, hi ha la possibilitat que els UAV proporcionin totes les mesures de camp i adquireixin dades d'alta qualitat de manera eficient (Daakir et al., 2017; Demir et al., 2018). ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012). En aquest sentit, Jin et al. (2017) van aprofitar les imatges d'alta resolució obtingudes pels UAV a altituds molt baixes per desenvolupar i avaluar un mètode per estimar la densitat de la planta de blat en l'etapa d'emergència. Segons els autors, els UAV superen les limitacions dels sistemes rover equipats amb càmeres i representen un mètode no invasiu per estimar la densitat de les plantes en els cultius, permetent als agricultors aconseguir l'alt rendiment necessari per al fenotipat del camp independentment de la circulabilitat del sòl. Li et al. (2016) van recollir centenars d'imatges estèreo amb una resolució extremadament alta mitjançant un sistema basat en UAV per estimar els paràmetres del blat de moro, inclosa l'alçada del dosser i la biomassa sobre el sòl. Finalment, Yue et al. (2017) van trobar que l'alçada del cultiu determinada a partir dels UAV podria millorar l'estimació de la biomassa sobre el sòl (AGB).
Un enfocament per controlar el creixement dels cultius és la idea de desenvolupar models de superfície de cultiu (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). Diversos estudis van destacar la viabilitat d'imatges preses des d'UAV per capturar l'alçada de les plantes i controlar-ne el creixement. Per exemple, Bendig et al. (2013) van descriure el desenvolupament de models de superfície de cultiu multitemporals amb una resolució molt alta de menys de 0.05 m utilitzant UAV. Tenien com a objectiu detectar els cultius
la variabilitat del creixement i la seva dependència del tractament del cultiu, el conreu i l'estrès. Bendig et al. (2014) van utilitzar UAV per estimar la biomassa fresca i seca a partir de l'alçada de la planta extreta de models de superfície de cultiu i van trobar que, a diferència de les plataformes aerotransportades i l'escaneig làser terrestre, les imatges d'alta resolució dels UAV poden augmentar significativament la precisió del modelatge de l'alçada de les plantes per a diferents creixements. etapes. En la mateixa línia, Geipel et al. (2014) van utilitzar UAV en la seva investigació per adquirir imatges
conjunts de dades per a la predicció del rendiment del gra de blat de moro en tres fases de creixement diferents des de principis fins a mitja temporada i van concloure que la combinació de modelatge espectral i espacial basat en imatges aèries i models de superfície de cultiu és un mètode adequat per predir el rendiment de blat de moro a mitja temporada. Finalment, Gnadinger ¨ i Schmidhalter (2017) van examinar la utilitat dels UAV en el fenotipat de precisió i van destacar que l'ús d'aquesta tecnologia podria millorar la gestió de les granges i permetre l'experimentació de camp amb finalitats agronòmiques i de cria. En general, observem que les publicacions del clúster 2 se centren en els principals avantatges dels drones a distància
fenotipat, estimació del rendiment, modelització de superfícies de cultiu i recompte de plantes. Els estudis futurs poden aprofundir desenvolupant nous mètodes per al fenotipat remot que puguin automatitzar i optimitzar el processament de dades de teledetecció (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al., 2021; ., XNUMX). A més, s'ha d'investigar el rendiment dels sensors IoT muntats en UAV i la compensació entre els seus costos, mà d'obra i precisió de l'estimació del rendiment.
futur (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). En definitiva, cal desenvolupar mètodes eficients de processament d'imatges que puguin generar informació fiable, maximitzar l'eficiència en la producció agrícola i minimitzar el treball de recompte manual dels agricultors (RU Khan et al., 2021; Koh et al., 2021; Lin). & Guo, 2020; C. Zhang et al., 2020).
Clúster 3. Les publicacions d'aquest clúster discuteixen els diferents tipus de sistemes d'imatge per a la teledetecció de recursos agrícoles utilitzats a les plataformes d'UAV. En aquest sentit, la imatge tèrmica permet controlar les temperatures superficials per prevenir danys als cultius i detectar precoçment l'estrès per sequera (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; 2021; Yeom, 2012). Baluja et al. (XNUMX) van afirmar que l'ús de càmeres multiespectrals i tèrmiques a bord del
UAV va permetre als investigadors obtenir imatges d'alta resolució i avaluar l'estat de l'aigua de la vinya. Això podria ser útil per desenvolupar nous models de programació de l'aigua mitjançant dades de teledetecció (Baluja et al., 2012). A causa de la
capacitat de càrrega limitada dels UAV, Ribeiro-Gomes et al. (2017) van considerar la integració de càmeres tèrmiques sense refrigerar als UAV per determinar l'estrès hídric a les plantes, cosa que fa que aquest tipus d'UAV sigui més eficient i viable que la teledetecció tradicional basada en satèl·lit i els UAV equipats amb càmeres tèrmiques refrigerades. Segons els autors, les càmeres tèrmiques sense refrigerar són més lleugeres que les càmeres refrigerades, i requereixen un calibratge adequat. González-Dugo et al. (2014) van demostrar que les imatges tèrmiques generen eficaçment mapes espacials dels índexs d'estrès hídric dels cultius per avaluar l'estat de l'aigua i quantificar l'estrès hídric entre i dins dels horts de cítrics. González-Dugo et al. (2013) i Santesteban et al. (2017) van investigar l'ús d'imatges tèrmiques d'UAV d'alta resolució per estimar la variabilitat de l'estat de l'aigua d'un hort comercial i una vinya.
La imatge multiespectral podria proporcionar dades massives en comparació amb les imatges RGB tradicionals (vermell, verd i blau) (Ad˜ ao et al., 2017; Navia et al., 2016). Aquestes dades espectrals, juntament amb les dades espacials, podrien ajudar en la classificació, la cartografia, la previsió, la predicció i la detecció (Berni et al., 2009b). Segons Candiago et al. (2015), la imatge multiespectral basada en UAV podria contribuir massivament a l'avaluació de cultius i a l'agricultura precisa com a recurs fiable i eficient. També,
Khaliq et al. (2019) va fer una comparació entre imatges multiespectrals basades en satèl·lit i UAV. Les imatges basades en UAV van resultar en ser més precises a l'hora de descriure la variabilitat de les vinyes, així com els mapes de vigor per representar les marquesines de cultius. En poques paraules, els articles d'aquest clúster discuteixen la incorporació de sensors d'imatge tèrmica i multiespectral als UAV agrícoles. En conseqüència, calen més investigacions per entendre com es poden integrar les imatges tèrmiques i multiespectrals amb la IA
tècniques (p. ex., aprenentatge profund) per detectar l'estrès de les plantes (Ampatzidis et al., 2020; Ampatzidis et al., 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). Aquests coneixements ajudaran a garantir una detecció més eficient i precisa, així com un seguiment del creixement, l'estrès i la fenologia de les plantes (Buters et al., 2019; Cao et al., 2020; Neupane i BaysalGurel, 2021; L. Zhou et al., 2020; XNUMX).
Clúster 4. Aquest clúster consta de set articles que giren al voltant del paper crucial de la imatge espectral i la imatge hiperespectral en el suport a les pràctiques agrícoles. La imatge hiperespectral s'ha consolidat com un mètode de teledetecció que permet l'avaluació quantitativa del sistema terrestre (Schaepman et al., 2009). Per ser més precisos, permet la identificació de materials superficials, la quantificació de concentracions (relatives) i l'assignació de proporcions de components superficials
dins de píxels mixts (Kirsch et al., 2018; Zhao et al., 2022). En altres paraules, la resolució espectral més alta que proporcionen els sistemes hiperespectrals permet estimacions més precises de diversos paràmetres, com ara les propietats vegetarianes o el contingut d'aigua de les fulles (Suomalainen et al., 2014). Els investigadors d'aquest clúster van investigar diversos aspectes d'aquests sistemes. Entre d'altres, Aasen et al. (2015b) va oferir un enfocament únic per obtenir informació hiperespectral tridimensional a partir de pes lleuger
càmeres instantànies utilitzades en UAV per al seguiment de la vegetació. Lucieer et al. (2014) van discutir el disseny, el desenvolupament i les operacions aèries d'un nou UAS hiperespectral, així com el calibratge, l'anàlisi i la interpretació de les dades d'imatge recollides amb ell. Finalment, Honkavaara et al. (2013b) van desenvolupar un enfocament de processament integral per a imatges espectrals basades en interferòmetre FabryPerot i van mostrar el seu ús en un procediment d'estimació de biomassa per a l'agricultura de precisió. Les possibles vies futures per a aquest clúster actual inclouen posar èmfasi en la necessitat de millores tècniques en les tecnologies de sensors (Aasen et al., 2015b), així com la necessitat d'incorporar i millorar tecnologies complementàries, específicament el big data i l'anàlisi (Ang & Seng, 2021; Radoglou). -Grammatikis et al., 2020; Shakoor et al., 2019). Aquest últim prové principalment de les dades cada cop més grans generades per diversos sensors implementats en l'agricultura intel·ligent (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021).
Clúster 5. Les publicacions d'aquest clúster van examinar aplicacions de mapes 3D basades en drons. L'ús de drons per al mapeig en 3D podria alleujar el complex treball de camp i augmentar l'eficiència substancialment (Torres-Sanchez ´ et al., 2015). Els cinc articles del clúster es van centrar principalment en aplicacions de monitoratge de plantes. Per exemple, per obtenir dades tridimensionals sobre l'àrea de la copa, l'alçada de l'arbre i el volum de la capçada, Torres-Sanchez ´ et al. (2015) van utilitzar la tecnologia UAV per generar models digitals de superfície i després enfocaments d'anàlisi d'imatges basats en objectes (OBIA). A més, Zarco-Tejada et al. (2014) van quantificar l'alçada de l'arbre integrant la tecnologia UAV i mètodes de reconstrucció fotogràfica tridimensional. Jim´enez-Brenes Lopez-Granados, ´ De Castro, et al. (2017) van demostrar un nou procés per al monitoratge multitemporal en 3D de desenes d'oliveres mitjançant la integració de la tecnologia UAV amb una metodologia avançada OBIA. Les vies interessants per a treballs futurs en aquest clúster inclouen la millora actual
metodologies (Zarco-Tejada et al., 2014) per a la modelització digital de superfícies (Ajayi et al., 2017; Jaud et al., 2016), com ara OBIA (de Castro et al., 2018, 2020; Ventura et al., 2018. , 2015), i la reconstrucció fotogràfica o el desenvolupament de mètodes nous (Díaz-Varela et al., 2015; Torres-S´ anchez et al., XNUMX).
Clúster 6. Aquest clúster analitza el paper dels drons en la vigilància agrícola. Els UAV podrien complementar i superar les deficiències de les imatges per satèl·lit i aeronaus. Per exemple, podrien proporcionar imatges d'alta resolució gairebé en temps real amb menys combustible o desafiaments de pilotatge, donant lloc a una vigilància constant i en temps real i millores en la presa de decisions (S. Herwitz et al., 2004). Una altra contribució clau dels UAV és la seva capacitat de proporcionar dades específiques del lloc per a l'agricultura de precisió o l'agricultura específica del lloc, ja que les seves dades detallades d'alta resolució sobre diversos paràmetres permeten als agricultors dividir la terra en parts homogènies i tractar-les en conseqüència (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012). Aquesta vigilància agrícola basada en UAV pot donar suport al control de la seguretat alimentària i a la presa de decisions (SR Herwitz et al., 2004). Per avançar en la investigació en vigilància agrícola, no només calen millores en sensors, UAV i altres tecnologies relacionades i els seus mètodes de comunicació i transferència de dades (Ewing et al., 2020; Shuai et al., 2019), sinó també la integració de drons amb diversos Les tecnologies per optimitzar diferents tasques en relació amb l'agricultura intel·ligent, com ara el seguiment, la vigilància agrícola i la presa de decisions, són una àrea d'investigació d'alt potencial (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). En aquest sentit, IoT, WSN i big data ofereixen capacitats complementàries interessants (van der Merwe et al., 2020). Els costos d'implementació, l'estalvi de costos, l'eficiència energètica i la seguretat de les dades es troben entre les àrees poc investigades per a aquesta integració (Masroor et al., 2021).
Països i institucions acadèmiques
El pas final va incloure la investigació del país d'origen i les afiliacions acadèmiques dels autors. Mitjançant aquesta anàlisi, pretenem entendre millor la distribució geogràfica dels estudiosos que contribueixen a les aplicacions dels drons a l'agricultura. Cal destacar la diversitat de països i institucions acadèmiques. Des de la perspectiva del país, els EUA, la Xina, l'Índia i Itàlia es troben al capdavant de la llista pel que fa al nombre de publicacions (taula 7). L'actual
La investigació sobre drons agrícoles es centra principalment als països d'Amèrica del Nord i Àsia, principalment a causa del seu alt compromís en aplicacions d'agricultura de precisió. Per exemple, als EUA, el mercat de drons agrícoles es va estimar en 841.9 milions de dòlars l'any 2020, que representa aproximadament el 30% de la quota de mercat global (ReportLinker, 2021). Es preveu que la Xina, que es classifica com l'economia més gran del món, assoleixi una mida aproximada de mercat de 2.6 milions de dòlars l'any 2027. Aquest país fa una crida als drons agrícoles per superar els problemes de productivitat i aconseguir millors rendiments, alleugeriment de la mà d'obra i menors inputs de producció. Tanmateix, l'adopció de la tecnologia a la Xina també està impulsada per factors com la mida de la població i la necessitat d'innovar i millorar les pràctiques de gestió de cultius existents.
Els països més productius i les universitats/organitzacions que hi contribueixen
investigació relacionada amb els drons agrícoles.
| Rank | països |
| 1 | USA |
| 2 | Xina |
| 3 | Índia |
| 4 | Itàlia |
| 5 | Espanya |
| 6 | Germany |
| 7 | Brasil |
| 8 | Austràlia |
| 9 | Japó |
| 10 | Regne Unit |
| Rank | Universitats/Organitzacions |
| 1 | Acadèmia Xinesa de Ciències |
| 2 | Ministeri d'Agricultura de la República Popular de la Xina |
| 3 | Consell Superior d'Investigacions Científiques |
| 4 | Universitat Texas A&M |
| 5 | Universitat agrícola de la Xina |
| 6 | Servei d'Investigació Agrícola de l'USDA |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | Purdue University |
| 9 | Consell Nacional d'Investigació |
| 10 | Universitat Agrícola de la Xina del Sud |
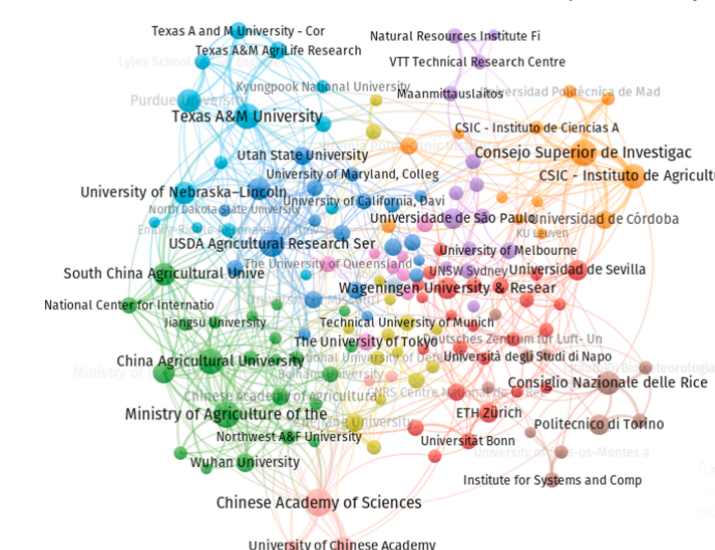
Des d'una perspectiva universitària i organitzativa, l'Acadèmia Xinesa de Ciències encapçala la llista pel que fa al nombre de publicacions, seguida del Ministeri d'Agricultura de la República Popular de la Xina i el Consejo Superior de Investigaciones Científicas. L'Acadèmia Xinesa de Ciències està representada pels autors Liao Xiaohan i Li Jun; Han Wenting representa el Ministeri d'Agricultura de la República Popular de la Xina; i el Consejo Superior de Investigaciones Científicas està representat per López-Granados, ´ F. i Pena, ˜ Jos´e María S. Des dels EUA, universitats com la Texas A&M University i la Purdue University troben la seva
esmentar. A la figura 4 es mostren les universitats amb un nombre més elevat de publicacions i les seves connexions. A més, aquesta llista inclou institucions com el Consiglio Nazionale delle Ricerche i el Consejo Superior de Investigaciones Científicas que actuen en recerca científica, però no són institucions acadèmiques. .
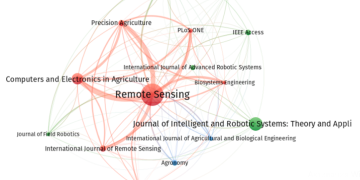
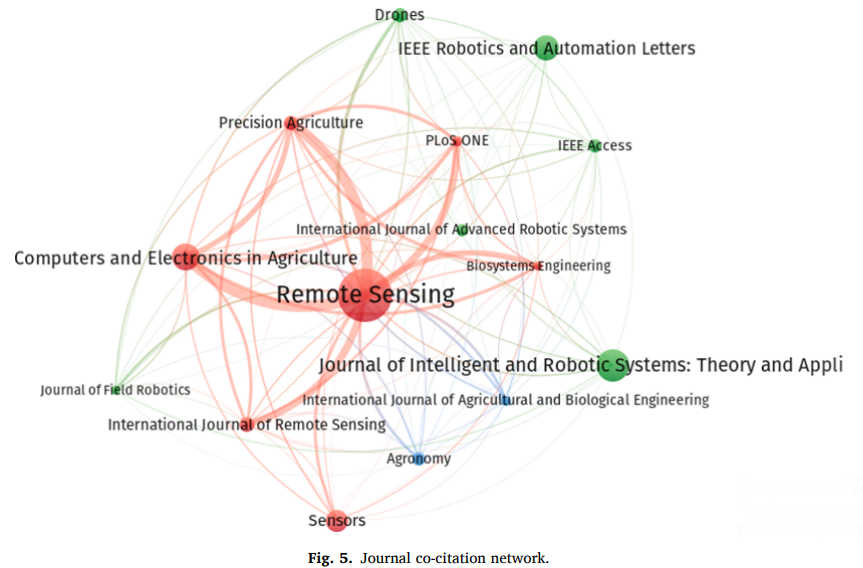
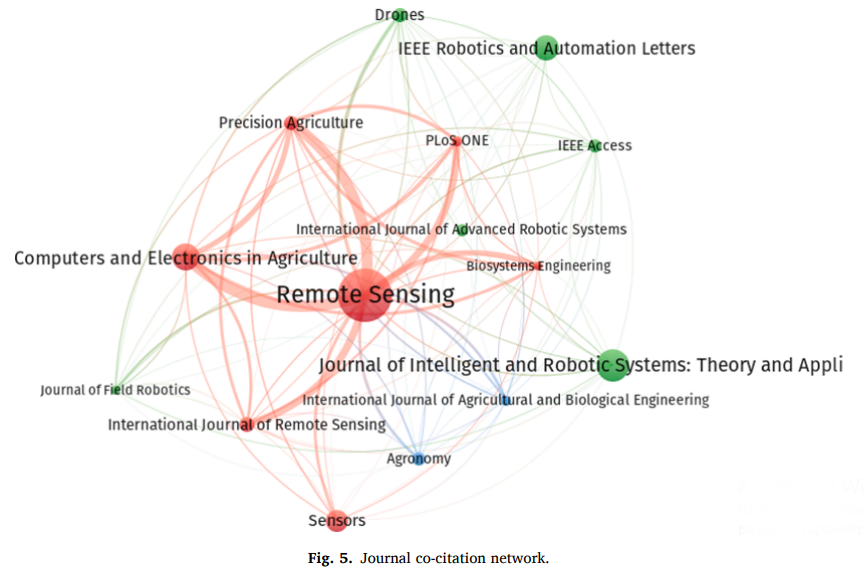
La nostra selecció incloïa una gran varietat de revistes, que abastaven pràcticament totes les dades disponibles. Tal com es mostra a la Taula 8, Remote Sensing amb 258 articles ocupa el primer lloc, seguit de Journal of Intelligent and Robotic Systems: Theory and Applications amb 126 i Computers and Electronics in Agriculture amb 98 articles. Mentre que la teledetecció se centra principalment en l'aplicació i el desenvolupament de drons, la informàtica i l'electrònica a l'agricultura cobreix principalment els avenços en maquinari, programari, electrònica i sistemes de control a l'agricultura. Els punts de venda transversals, com ara IEEE Robotics and Automation Letters amb 87 publicacions i IEEE Access amb 34 publicacions, també són els principals punts de venda en el camp. Els quinze principals mitjans han contribuït a la literatura amb 959 documents, que és aproximadament el 20.40% de totes les publicacions. Una anàlisi de co-citació de revistes ens permet examinar la importància i la similitud entre publicacions. L'anàlisi de co-citació produeix tres grups, tal com es mostra a la figura 5. El clúster vermell està format per revistes com Remote Sensing, Computer and Electronics in Agriculture, Sensors,
i el International Journal of Remote Sensing. Tots aquests punts de venda són revistes de gran reputació en les àrees de teledetecció i agricultura de precisió. El clúster verd conté revistes que tracten sobre robòtica, com ara Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access i Drones. Aquests punts de venda majoritàriament publiquen articles sobre automatització i són útils per als enginyers agrònoms. El clúster final està format per revistes relacionades amb l'agronomia i l'enginyeria agrícola, com Agronomy i International Journal of Agricultural and Biological Engineering.
Les 15 revistes principals en recerca relacionada amb drons agrícoles.
| Rank | Revista | Comptar |
| 1 | Teledetecció | 258 |
| 2 | Revista de Sistemes Intel·ligents i Robòtics: Teoria i Aplicacions | 126 |
| 3 | Informàtica i electrònica a l'agricultura | 98 |
| 4 | Cartes de robòtica i automatització IEEE | 87 |
| 5 | Sensors | 73 |
| 6 | Revista Internacional de Teledetecció | 42 |
| 7 | Agricultura de precisió | 41 |
| 8 | avions no tripulats | 40 |
| 9 | Agronomia | 34 |
| 10 | Accés IEEE | 34 |
| 11 | Revista Internacional de Sistemes Robòtics Avançats | 31 |
| 12 | Revista Internacional d'Enginyeria Agrícola i Biològica | 25 |
| 13 | PLoS ONE | 25 |
| 14 | Revista de robòtica de camp | 23 |
| 15 | Enginyeria de Biosistemes | 23 |
Conclusió
resum
En aquest estudi, hem resumit i analitzat la investigació existent sobre drons agrícoles. Aplicant diverses tècniques bibliomètriques, ens hem esforçat per obtenir una millor comprensió de l'estructura intel·lectual de la recerca relacionada amb els drons agrícoles. En resum, la nostra revisió ofereix diverses contribucions mitjançant la identificació i discussió de paraules clau a la literatura, revelant grups de coneixement alhora que formen comunitats semànticament similars en el camp dels drons, esbossant investigacions anteriors i suggerint direccions futures de recerca. A continuació, es descriuen les principals conclusions de la revisió sobre el desenvolupament de drons agrícoles:
• La literatura global ha crescut ràpidament i ha cridat una enorme atenció durant l'última dècada, com ho indica l'augment del nombre d'articles després del 2012. Tot i que aquest camp del coneixement encara no ha arribat a la seva plena maduresa (Barrientos et al., 2011; Maes). & Steppe, 2019), diverses preguntes encara estan sense resposta. Per exemple, la utilitat dels drons en l'agricultura d'interior encara està oberta a debat (Aslan et al., 2022; Krul et al., 2021; Rold'an et al., 2015). La complexitat de les escenes de camp i les diferents circumstàncies d'imatge (per exemple, ombres i il·luminació) podrien donar lloc a una major variància espectral a la classe (Yao et al., 2019). Fins i tot en les fases de recerca posteriors, els investigadors han tingut el repte de determinar plans de vol òptims segons escenaris particulars i la qualitat de la imatge requerida (Soares et al., 2021; Tu et al.,
2020).
• Observem que el camp ha avançat del desenvolupament de sistemes d'UAV eficients a la incorporació de tècniques d'IA, com ara l'aprenentatge automàtic i l'aprenentatge profund en el disseny de drons agrícoles (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• La investigació sobre drons agrícoles va discutir predominantment la teledetecció explorant els potencials de la tecnologia en el seguiment ambiental, la gestió de cultius i la gestió de males herbes (clúster 1), així com el fenotipat remot i l'estimació del rendiment (clúster 2). Un conjunt d'estudis influents sobre drons agrícoles inclouen Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex i Remondino (2014) i Zhang i Kovacs (2012). Aquests estudis van desenvolupar la base conceptual de la investigació relacionada amb els drons en el context de l'agricultura.
• En relació amb la metodologia, vam observar que la major part de la recerca feta fins ara s'havia compost per estudis de disseny de sistemes, conceptuals o basats en revisions (Inoue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; Yao et al., 2019). També observem una manca de mètodes empírics, qualitatius i basats en estudis de casos en la investigació dels drons agrícoles.
• Recentment, els temes relacionats amb l'agricultura de precisió, les tècniques d'IA, la viticultura de precisió i l'avaluació de l'estrès hídric han cridat una atenció substancial (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). Un examen atent dels clústers de recerca en dues èpoques separades, 1990–2010 i 2011–2021, revela el progrés de l'estructura intel·lectual del domini. El període de 1990 a 2010 va constituir l'acumulació de les nocions centrals i els conceptes de drons, cosa que es desprèn de la discussió sobre el disseny, desenvolupament i implementació d'UAV. En la segona era, l'enfocament de la investigació s'amplia en estudis previs, fent un esforç per sintetitzar casos d'ús d'UAV en agricultura. També hem trobat nombrosos estudis que discuteixen les aplicacions de drons en tasques d'imatge i agricultura de precisió.
| Rank | Revista | Comptar |
| 1 | Teledetecció | 258 |
| 2 | Revista de Sistemes Intel·ligents i Robòtics: Teoria i | 126 |
| Aplicacions | ||
| 3 | Informàtica i electrònica a l'agricultura | 98 |
| 4 | Cartes de robòtica i automatització IEEE | 87 |
| 5 | Sensors | 73 |
| 6 | Revista Internacional de Teledetecció | 42 |
| 7 | Agricultura de precisió | 41 |
| 8 | avions no tripulats | 40 |
| 9 | Agronomia | 34 |
| 10 | Accés IEEE | 34 |
| 11 | Revista Internacional de Sistemes Robòtics Avançats | 31 |
| 12 | Revista Internacional d'Enginyeria Agrícola i Biològica | 25 |
| 13 | PLoS ONE | 25 |
| 14 | Revista de robòtica de camp | 23 |
| 15 | Enginyeria de Biosistemes | 22 |
Implicacions
La nostra revisió bibliomètrica s'ha dissenyat i realitzat tenint en compte els estudiosos, els agricultors, els experts agrícoles, els consultors de cultius i els dissenyadors de sistemes d'UAV. Segons el coneixement dels autors, aquesta és una de les primeres revisions originals que ha dut a terme una anàlisi bibliomètrica en profunditat de
aplicacions de drons a l'agricultura. Hem realitzat una revisió exhaustiva d'aquest cos de coneixement, utilitzant anàlisis de citació i cocitació de publicacions. Els nostres intents de descriure l'estructura intel·lectual de la investigació amb drons també ofereixen noves idees per als acadèmics. Una revisió acurada de les paraules clau utilitzades al llarg del temps revela els punts d'interès i les àrees de recerca focals de la literatura relacionada amb els drons. A més, presentem una llista dels estudis més citats per identificar els treballs de recerca més impactants realitzats en el camp. La identificació d'articles i paraules clau podria, en conseqüència, proporcionar un punt de partida sòlid per descobrir diverses vies per a futurs estudis.
És important destacar que vam revelar clústers que classifiquen treballs comparables i vam elaborar els resultats. Els estudis classificats en clústers ajuden a entendre l'estructura intel·lectual de la recerca d'UAV. En particular, vam descobrir una manca d'estudis que investiguin els factors d'adopció dels drons
i barreres en les activitats agrícoles (vegeu la taula 9). Els futurs investigadors podrien abordar aquesta bretxa potencial realitzant investigacions empíriques que avaluïn els factors d'adopció dels drons en diferents activitats agrícoles i condicions climàtiques. A més, la investigació basada en estudis de cas sobre l'eficàcia dels drons hauria d'estar recolzada amb dades reals del camp. A més, implicar agricultors i gestors en la investigació acadèmica seria avantatjós tant per a l'avenç teòric com pràctic de la investigació amb drons. També vam poder identificar els investigadors més destacats i les seves contribucions, la qual cosa és valuosa perquè la consciència dels últims treballs fonamentals pot oferir una guia per a futurs esforços acadèmics.
Taula 9
Barreres d'adopció d'UAV.
| Barrera | Descripció |
| Seguretat de dades | La ciberseguretat és un repte important per a la seva implementació Solucions IoT (Masroor et al., 2021). |
| Interoperabilitat i integració | Diverses tecnologies com ara UAV, WSN, IoT, etc. s'han d'integrar i transmetre dades que augmentar el nivell de complexitat (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). |
| Costos d'implantació | Aquest és específicament el cas dels petits agricultors i per integrant diverses tecnologies d'avantguarda ( Masroor et al., 2021). |
| Coneixement laboral i expertise | Es necessiten pilots de drons qualificats per operar els UAV. Així mateix, la implementació de diverses avantguardes tecnologies requereixen treballadors qualificats (YB Huang et al., 2013; Tsouros et al., 2019). |
| Potència del motor i vol durada | Els drons no es poden operar durant llargues hores i cobertes grans àrees (Hardin i Hardin, 2010; Laliberte et al., 2007). |
| Estabilitat, fiabilitat i maniobrabilitat | Els drons no són estables en condicions meteorològiques adverses (Hardin i Hardin, 2010; Laliberte et al., 2007). |
| Limitacions de càrrega útil i qualitat dels sensors | Els drons només poden portar càrregues limitades capacitat de carregar sensors de menor qualitat (Nebiker et al., 2008). |
| Regulació | Com que els drons també poden ser perillosos, n'hi ha greus regulacions en algunes àrees (Hardin i Jensen, 2011; Laliberte & Rango, 2011). |
| Coneixement dels pagesos i interès | Com altres tecnologies d'avantguarda, els drons una implementació exitosa necessita experiència i també acompanyat d'incerteses (Fisher et al., 2009; Lambert et al., 2004; Stafford, 2000). |
Com que hi ha una necessitat constant d'utilitzar de manera eficient els recursos disponibles per maximitzar els rendiments, els agricultors poden aprofitar els drons per garantir una exploració ràpida, precisa i rendible dels seus camps. La tecnologia pot ajudar els agricultors a determinar l'estat dels seus cultius i avaluar l'estat de l'aigua, l'etapa de maduració, les infestacions d'insectes i les necessitats nutricionals. Les capacitats de teledetecció dels drons poden proporcionar als agricultors dades crucials per anticipar els problemes en una fase inicial i fer les intervencions adequades ràpidament. No obstant això, els beneficis de la tecnologia només es poden realitzar si els reptes s'aborden correctament. A la llum de la
problemes actuals sobre seguretat de dades, problemes de tecnologia de sensors (per exemple, la fiabilitat o precisió de les mesures), la complexitat de la integració i els costos d'implementació substancials, els estudis futurs també han d'examinar la viabilitat tècnica, econòmica i operativa d'integrar drons agrícoles i altres talls. tecnologies de punta.
Limitacions
El nostre estudi té diverses limitacions. En primer lloc, els resultats estan determinats per les publicacions seleccionades per a l'anàlisi final. És difícil capturar tots els estudis rellevants relacionats amb els drons agrícoles, especialment els que no estan indexats a la base de dades Scopus. A més, el procés de recollida de dades es limita a l'establiment de paraules clau de cerca, que poden no ser inclusives i conduir a troballes poc concloents. Per tant, els estudis futurs han de prestar més atenció a la qüestió subjacent de la recollida de dades
conclusions més fiables. Una altra limitació es refereix a les noves publicacions amb un nombre baix de citacions. L'anàlisi bibliomètrica està esbiaixada cap a publicacions anteriors, ja que tendeixen a rebre més cites al llarg dels anys. Els estudis recents necessiten un cert temps per cridar l'atenció i acumular citacions. En conseqüència, els estudis recents que porten un canvi de paradigma no figurarien entre les deu obres més influents. Aquesta limitació predomina en l'examen de dominis de recerca emergents ràpidament com els drons agrícoles. Com hem consultat Scopus per estudiar la literatura per a aquest treball, els futurs investigadors podrien considerar diferents
bases de dades, com ara Web of Science i IEEE Xplore, per ampliar l'horitzó i millorar l'estructura de recerca.
Els estudis bibliomètrics potencials poden tenir en compte altres fonts de coneixement vitals, com ara articles de conferències, capítols i llibres per generar noves idees. Malgrat cartografiar i investigar publicacions globals sobre drons agrícoles, les nostres troballes no van revelar els motius dels resultats acadèmics de les universitats. Això obre el camí cap a una nova àrea d'investigació per explicar qualitativament per què algunes universitats són més productives que altres quan es tracta d'investigar sobre l'agricultura.
drons. A més, els estudis futurs podrien proporcionar informació sobre el potencial dels drons per augmentar la sostenibilitat agrícola de diverses maneres, com ara el seguiment ambiental, la gestió dels cultius i el mapatge de males herbes, tal com indiquen diversos investigadors (Chamuah i Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). Atès que l'anàlisi textual no va ser possible a causa de l'elevat nombre de treballs seleccionats, hi ha una necessitat de revisions sistemàtiques de la literatura que examinin la
mètodes de recerca utilitzats i la participació dels agricultors en estudis previs. En resum, la nostra anàlisi de la investigació amb drons exposa els enllaços invisibles d'aquest cos de coneixement. Per tant, aquesta revisió ajuda a descobrir les relacions entre publicacions i explora l'estructura intel·lectual del camp de recerca. També descriu els vincles entre els diferents aspectes de la literatura, com ara les paraules clau dels autors, les afiliacions i els països.
Declaració d’interès competencial
Els autors declaren que no tenen interessos financers o relacions personals en competència coneguts que haguessin pogut semblar influir en el treball reportat en aquest document.
Apèndix 1
TITLE-ABS-KEY (((drone* O "vehicle aeri no tripulat" O uav* O "sistema d'aeronaus no tripulades)” O uas O “avió pilotat a distància”) I (agricultura O agricultura O ramadera O pagès))) I (EXCLOU (PUBYEAR, 2022)) I (LIMIT-TO (IDIOMA, “Anglès”)).
referències
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. Generació d'informació hiperespectral 3D amb càmeres d'instantània UAV lleugeres per al seguiment de la vegetació: a partir de
calibratge de la càmera per garantir la qualitat. ISPRS J. Photogramm. Remote Sens. 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Desenvolupament d'un algorisme de reconeixement de patrons per a la detecció automàtica d'ocells a partir d'imatges de vehicles aeris no tripulats.
Enquesta. Terra Informar. Ciència. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. Xarxes de sensors sense fil a l'agricultura: coneixements de l'anàlisi bibliomètrica. Sostenibilitat 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., Avaluació de diferents mètodes per a la detecció d'ombres en imatges òptiques d'alta resolució i avaluació de l'impacte de l'ombra en el càlcul de NDVI i evapotranspiració. Irrig. Ciència. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Pàdua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Hyperspectral imaging: a review on UAV-based sensors, data processament i
aplicacions per a l'agricultura i la silvicultura. Teledetecció 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Imatge multitemporal mitjançant un vehicle aeri no tripulat per al seguiment d'un cultiu de gira-sol. Biosist. Eng.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. Generació de models digitals d'elevació precisos a partir d'imatges de superposició de baix percentatge d'UAV adquirides. Int.
J. Remote Sens. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Revisió dels enfocaments d'aprenentatge automàtic per a les recuperacions de biomassa i humitat del sòl a partir de dades de teledetecció. Teledetecció 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Green internet of things using UAVs in B5G networks: a review of applications
i estratègies. Anunci. Hoc. Netw. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Drones per al seguiment del bestiar oví. A: 20th IEEE Mediterranean Electrotechnical Conference. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. Fenotipat d'alt rendiment basat en UAV en cítrics mitjançant imatges multiespectrals i intel·ligència artificial. Teledetecció 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: aplicació basada en el núvol per processar, analitzar i visualitzar dades recollides amb UAV per a aplicacions d'agricultura de precisió que utilitzen intel·ligència artificial. Informàtica. Electró. Agrícola. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Big data i machine learning amb informació hiperespectral en agricultura. Accés IEEE 9, 36699–36718. https://doi.org/10.1109/
ACCÉS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Revisió: tecnologies d'agricultura de bestiar de precisió en sistemes de bestiar basats en pastures. Animal 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., Trends on advanced information and communication technologies for
Millora de les productivitats agrícoles: una anàlisi bibliomètrica. Agronomia 10 (12), article 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. The flying gator: to aerial robotics in occam-π. Commun. Arquitecte de processos. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. Estructura intel·lectual de la investigació sobre el comportament de queixa del consumidor (CCB): una anàlisi bibliomètrica. J. Empresa Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
Una enquesta exhaustiva dels estudis recents amb UAV per a l'agricultura de precisió en camps oberts i hivernacles. Appl. Ciència. 12 (3), 1047. https://doi.org/10.3390/
aplicació 12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E. i Wells, DM (2018). Fenotipat de camp per al futur. A Annual Plant Reviews en línia (pàgs. 719–736). Joan
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Unmanned Aircraft Systems: UAVS Design, Development and Deployment. A: Sistemes d'aeronaus no tripulades: Disseny, desenvolupament i desenvolupament d'UAVS
Desplegament. John Wiley i els seus fills. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. La teledetecció basada en UAV en l'estrès de les plantes, imagineu-vos amb un sensor tèrmic d'alta resolució per a pràctiques d'agricultura digital: una meta-revisió. Int. J. Entorn. Ciència. Tecnol. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Agricultura intel·ligent: oportunitats, reptes
i facilitadors tecnològics. 2018 IoT Vertical i. Cimera d'actualitat sobre l'agricultura - Toscana (IOT Toscana) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. Aprenentatge profund amb etiquetatge de dades no supervisat per a la detecció de males herbes en cultius en línia en imatges d'UAV. Teledetecció 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Processos normatius versus socials constructivistes en l'assignació de citacions: un model analític en xarxa. Am. Sociol. Rev. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Assessment of vineyard water status variability by thermal and multispectral
imatges utilitzant un vehicle aeri no tripulat (UAV). Irrig. Ciència. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L.,Crea de pròxima generació. Planta Sci. 242, 3–13. https://doi.org/10.1016/j.
plantsci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. Perspectives sobre l'ús de sistemes aeris no tripulats per controlar el bestiar. Perspectives agrícoles. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Hiperespectral de baix pes i basat en UAV càmeres de fotograma complet
per al seguiment de cultius: comparació espectral amb mesures d'espectroradiòmetre portàtil. Fotogrametria, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial remote sensing in agriculture: A practical approach to area coverage
i planificació de rutes per a flotes de mini robots aeris. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. Una enquesta sobre l'aplicació d'algoritmes de planificació de rutes per a UAV multirotor amb precisió
agricultura. J. Navig. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. L'estat de l'art de l'agricultura intensiva en coneixement: una revisió sobre sistemes de detecció aplicats i anàlisi de dades. J. Sens. 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. Imatges basades en UAV per a models de superfície de cultiu multitemporals i de molt alta resolució per controlar la variabilitat del creixement dels cultius. Fotogrametria, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Estimació de la biomassa d'ordi mitjançant models de superfície de cultiu (CSM) derivats d'imatges RGB basades en UAV. Teledetecció 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. Combinant l'alçada de la planta basada en UAV des de la superfície del cultiu models,
índexs de vegetació visibles i infrarojos propers per al seguiment de la biomassa en ordi. Int. J. Appl. Obs de la Terra. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. Cartografia de la conductància de la canopy i CWSI en oliveres amb alta resolució
imatges de teledetecció tèrmica. Remote Sens. Medi ambient. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Fereres, E., 2009b. Teledetecció multiespectral tèrmica i de banda estreta per al seguiment de la vegetació des d'un vehicle aeri no tripulat. IEEE Trans. Geosci. Remote Sens. 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet de les coses en seguretat alimentària: revisió de la literatura i anàlisi bibliomètrica. Tendències Alimentació Ciència. Tecnol. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT in agriculture: Designing a Europe-wide largescale pilot. IEEE Commun. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Seguiment d'UAV multisensor de plàntules individuals i comunitats de plàntules amb una precisió mil·limètrica. Drones 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Avaluació d'imatges multiespectrals i índexs de vegetació per a aplicacions d'agricultura de precisió a partir d'imatges d'UAV. Teledetecció 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. Seguiment dels indicadors de creixement de la remolatxa sucrera mitjançant l'índex de vegetació d'ampli rang dinàmic (WDRVI) derivat d'UAV
imatges multiespectrals. Informàtica. Electró. Agrícola. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Evolution of the intellectual structure of family business literature: a bibliometric study of FBR. Empresa familiar Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Seguiment dinàmic de la biomassa d'arròs sota
diferents tractaments de nitrogen utilitzant un dron lleuger amb càmeres d'instantànies amb fotograma dual. Plant Methods 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. Garantir la sostenibilitat a l'agricultura índia mitjançant UAV civil: una perspectiva d'innovació responsable. SN Appl. Ciència. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Govern responsable de les innovacions de vehicles aeris no tripulats civils (UAV) per a aplicacions d'assegurances de cultius índies. J. Responsable
Tecnol. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Aplicació d'imatges aèries de canal visible d'alta resolució del dosel de cultius a la gestió de precisió del reg. Agrícola. Aigua
Gestionar. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV lleuger amb fotogrametria a bord i posicionament GPS d'una sola freqüència per a aplicacions de metrologia. ISPRS J. Photogramm. Remote Sens. 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Plataforma IoT basada en blockchain per a la gestió autònoma d'operacions de drons. A: Actes de la 2a ACM
Taller de MobiCom sobre comunicacions sense fil assistides per drons per a 5G i més enllà, pàgs. 31–36. https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B., 1998. Com escriure i publicar un article científic. Cambridge University Press. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. Mapping cynodon dactylon infesting cultius de cobertura amb un procediment automàtic d'arbre de decisió-OBIA i imatges d'UAV per a la viticultura de precisió. Teledetecció 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. An automatic random forest-OBIA algorithm for mapes primerencs de males herbes entre i dins de les files de cultius mitjançant imatges d'UAV. Teledetecció 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. Mesura automatitzada de l'alçada de les plantes dels genotips de blat mitjançant un DSM derivat d'imatges d'UAV. Actes 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Xarxa de segmentació semàntica lleugera per a mapeig de males herbes en temps real mitjançant vehicles aeris no tripulats. Appl. Ciència. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. Teledetecció multiespectral basada en UAV per a l'agricultura de precisió: una comparació entre diferents càmeres. ISPRS J. Photogramm. Remote Sens. 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. Machine learning and remote sensing techniques apply to estimate soil indicators – review. Ecol. Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. Imatges d'UAV aerotransportades d'alta resolució per avaluar els paràmetres de la corona de l'olivera mitjançant una foto en 3D
reconstrucció: aplicació en assaigs de millora. Teledetecció 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Gestió de la capacitat aeroportuària: una revisió i anàlisi bibliomètrica. J. Air Transp. Gestionar. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
Utilitzant imatges RapidEye per identificar la variabilitat dins del camp del creixement i el rendiment dels cultius a Ontario, Canadà. Agricultura de precisió. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. Aplicació de drons agrícoles i iot per entendre la cadena de subministrament d'aliments durant el post COVID-19. A: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Agricultural Informatics: Automation Using the IoT and Machine Learning. Wiley, pàgs. 67–87. van Eck, N., Waltman, L., 2009. Enquesta de programari: VOSviewer, un programa informàtic per a mapeig bibliomètric. Cienciometria 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. Una visió general de l'Internet de les coses (IoT) i l'anàlisi de dades a l'agricultura: beneficis i reptes.
IEEE Internet Things J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. Validation of agronomic UAV i camp
mesures per a varietats de tomàquet. Informàtica. Electró. Agrícola. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. Avaluació de l'estrès hídric basat en teledetecció i multiespectral d'alta resolució a
vinyes de regadiu subterrània. Teledetecció 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Utilitzant la teledetecció hiperespectral per a la gradació del sòl. Detecció remota 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. Avaluació multiescala dels índexs de reflectància superficial multiespectral i de vegetació basats en drons en condicions operatives. Teledetecció 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Estudi de tecnologies de comunicació sense fil a Internet de les coses per a l'agricultura de precisió. Sense fil Pers. Commun. 108 (3),
1785-1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. The transaction costs theory in international business research: a bibliometric study over three decades. Cienciometria 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. Avenços en l'agricultura de precisió al sud-est d'Austràlia. I. una metodologia de regressió per simular
variació espacial dels rendiments de cereals utilitzant els rendiments històrics dels paddock dels agricultors i l'índex de vegetació de diferència normalitzada. Cultiu Pastura Sci. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. Ciència, tecnologia i futur dels petits drons autònoms. Nature 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. Internet de les coses per al futur de l'agricultura intel·ligent: una enquesta completa de tecnologies emergents. IEEE CAA J. Autom. Sinica 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. Fig plant segmentation a partir d'imatges aèries mitjançant una xarxa profunda de codificador-descodificador convolucional. Teledetecció 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs challenge to assess water stress for
agricultura sostenible. Agrícola. Gestió de l'aigua. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Plegezuelo, CR, Dur´ an-Zuazo, VH, 2018. Thermal imaging a la planta
nivell per avaluar l'estat de l'aigua del cultiu en ametllers (cv. Guara) sota estratègies de reg deficitari. Agrícola. Gestió de l'aigua. 208, 176–186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Mesures de reflectància superficial i espectroscòpia de fluorescència induïda pel sol mitjançant un petit UAS hiperespectral. Teledetecció 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. An automatic method for
cartografia de males herbes als camps de civada a partir d'imatges d'UAV. Informàtica. Electró. Agrícola.
Gebbers, R., Adamchuk, VI, 2010. Agricultura de precisió i seguretat alimentària. Science 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Modelització espectral i espacial combinada del rendiment del blat de moro basat en imatges aèries i models de superfície de cultiu adquirits amb un sistema d'avió no tripulat. Teledetecció 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Disseny sostenible per als usuaris: una revisió de la literatura i anàlisi bibliomètrica. Entorn. Ciència. Contaminar. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. Generació de superfícies de resposta espectraltemporal combinant satèl·lit multiespectral i hiperespectral
Imatges d'UAV per a aplicacions d'agricultura de precisió. IEEE J. Sel. Superior. Appl. Obs de la Terra. Remote Sens. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. L'agricultura basada en IoT com a servei de núvol i big data: el començament de l'Índia digital. J. Org. i Informàtica d'usuari final. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Anàlisi de la cocitació i la recerca de col·legis invisibles: una avaluació metodològica. Cienciometria 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Recomptes digitals de plantes de blat de moro per vehicles aeris no tripulats (UAV). Teledetecció 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. Un vehicle aeri no tripulat d'ala giratòria per a la vigilància de males herbes aquàtiques i
gestió. J. Intel. Sistema robòtic: Theor. Appl. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´on, ´ D., De Castro, AI, López-Granados, ´ F., 2014. Avaluació de la precisió de mosaics d'imatges de vehicles aeris no tripulats (UAV) per a finalitats d'agricultura de precisió en blat. Precis. Agrícola. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. Fenotipat de camp de l'estrès hídric a escala d'arbres mitjançant imatges detectades amb UAV : nous coneixements per a
Adquisició tèrmica i calibratge. Precis. Agrícola. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. Aplicabilitat i limitacions de l'ús de l'índex d'estrès hídric del cultiu com a indicador de dèficits hídrics en horts de cítrics. Agrícola. Per. Meteorol. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. Using high resolution UAV thermal imagery to
avaluar la variabilitat de l'estat de l'aigua de cinc espècies d'arbres fruiters dins d'un hort comercial. Precis. Agrícola. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. Financial literacy: A systematic review and bibliometric analysis. Int. J. Consumer Studies 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. The photogrammetric potential of lowcost uavs in forestry and agriculture. Arxius internacionals de fotogrametria, teledetecció i ciències de la informació espacial – Arxius ISPRS 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. Avaluació de la correlació d'alta resolució
NDVI amb nivell d'aplicació de fertilitzants i rendiment de cultius d'arròs i blat amb UAV petits. Teledetecció 11 (2), 112.
Gundolf, K., Filser, M., 2013. Recerca en gestió i religió: una anàlisi de citacions. J. Bus. Ètica 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. Simulació CFD i verificació experimental de l'espai i distribucions temporals de
el flux d'aire de rentat descendent d'un UAV agrícola de quatre rotors en flotació. Informàtica. Electró. Agrícola. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , Polònia, J., 2016.
Aplicació de sistemes aeris no tripulats per al fenotipat d'alt rendiment de grans vivers de cria de blat. Plant Methods 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. Imatges espectrals d'UAV en condicions d'il·luminació variables . A GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Número 1W2, pàg. 189–194). Societat Internacional de Fotogrametria i Teledetecció. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. Tècniques d'avaluació per mapejar la vegetació de l'illa des de l'aire no tripulat
Imatges de vehicles (UAV): classificació de píxels, interpretació visual i enfocaments d'aprenentatge automàtic. Int. J. Appl. Obs de la Terra. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Agricultura intel·ligent mitjançant un lideratge responsable a Bangla Desh: possibilitats, oportunitats i més enllà.
Sostenibilitat 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Vehicles pilotats a distància a petita escala en investigació ambiental. Brúixola de geografia 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. Vehicles aeris no tripulats a petita escala en teledetecció ambiental: reptes i oportunitats. GISci. Remote Sens. 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Agricultural Internet of Things: technologies and applications, (1a ed. edició 2021). Springer.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
Imatge d'un vehicle aeri no tripulat: vigilància agrícola i suport a la decisió. Informàtica. Electró. Agrícola. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, Fenotipat de camp d'alt rendiment de l'alçada i la taxa de creixement de la planta de blat en assaigs de parcel·les de camp mitjançant teledetecció basada en UAV. Teledetecció 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. Processament i avaluació d'imatges espectromètriques i estereoscòpiques recollides mitjançant una càmera espectral UAV lleugera per a l'agricultura de precisió. Teledetecció 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Serveis d'Internet de les coses basats en vehicles aeris no tripulats a baixa altitud: enquesta completa i perspectives futures. IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. Navegació combinada de flux òptic i estèreo de canyons urbans per a un UAV. A: 2005 IEEE/RSJ
Conferència internacional sobre robots i sistemes intel·ligents, pàgs. 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. Una plataforma d'agricultura creativa IoT per a la computació de boira en núvol. Mantenir. Informàtica. Inf. Syst. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. Una xarxa totalment convolucional per al mapeig de males herbes de vehicles aeri no tripulats ( imatges d'UAV). PLoS ONE 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Aprenentatge profund versus anàlisi d'imatges basades en objectes (OBIA) en el mapeig de males herbes d'imatges d'UAV. Int. J.
Remote Sens. 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. Calibració de color profund per a imatges d'UAV en el seguiment de cultius
utilitzant la transferència d'estil semàntic amb atenció local a global. Int. J. Appl. Obs de la Terra. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. Desenvolupament i perspectiva de tecnologies de vehicles aeris no tripulats per a la producció agrícola
gestió. Int. J. Agric. Biol. Eng. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Desenvolupament d'un sistema de polvorització per a una plataforma de vehicle aeri no tripulat. Appl. Eng. Agrícola. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. Adquisició de fotografies digitals NIR-verd-blau de
avions no tripulats per al seguiment de cultius. Teledetecció 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Teledetecció basada en satèl·lit i drons de cultius i sòls per a l'agricultura intel·ligent: una revisió. Ciència del sòl. Planta de nou. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. Una revisió de les aplicacions i tecnologies de comunicació per a Internet de les coses (IoT) i
Agricultura intel·ligent sostenible basada en vehicles aeri no tripulats (UAV). Sostenibilitat 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Avaluació de la precisió dels models de superfície digitals d'alta resolució calculats per
PhotoScan® i MicMac® en condicions d'enquesta subòptimes. Teledetecció 8 (6), https://doi.org/10.3390/rs8060465.
Jim´enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017. Quantifying poda impacts on olive tree architecture and annual creixement de la coberta mitjançant el modelatge 3D basat en UAV. Plant Methods 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. Estimacions de la densitat de plantes dels cultius de blat a l'emergència d'imatges d'UAV a molt baixa altitud. Remote Sens.
Entorn. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Sistema de control de productes agrícoles compatible amb la computació en núvol. Clúster Informàtica. 22 (4), 8929–8938.
Ju, C., & Son, HI 2018a. Avaluació del rendiment de múltiples sistemes UAV per a teledetecció en agricultura. Actes del Workshop on Robotic Vision and Action in Agriculture a la IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Austràlia, 21–26.
Ju, C., Son, HI, 2018b. Múltiples sistemes UAV per a aplicacions agrícoles: control, implementació i avaluació. Electrònica 7 (9), 162. https://doi.org/10.3390/
electrònica 7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. El potencial de la teledetecció i la intel·ligència artificial com a eines per millorar la
resiliència dels sistemes de producció agrícola. Curr. Opina. Biotecnologia. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. Una tècnica d'exploració de cultius millorada que incorpora imatges de cultius multiespectrals assistides per vehicles aeri no tripulats a la pràctica d'exploració convencional per a la tija gomosa a la síndria. Planta Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. Avenços en la recerca de xarxes socials: passat, present i futur. Informar. Syst. Davant. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: xarxa de detecció de malalties de la vinya basada en imatges multiespectrals i mapa de profunditat. Teledetecció 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. Comparació d'imatges multiespectrals basades en satèl·lit i UAV per a vinyes
avaluació de la variabilitat. Teledetecció 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. La cadena de blocs IoT va permetre un sistema de procedència optimitzat per a la indústria alimentària 4.0 mitjançant l'aprenentatge profund avançat. Sensors 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. Detecció basada en imatges de malalties vegetals: des de l'aprenentatge automàtic clàssic fins al viatge d'aprenentatge profund. Comunicació sense fils. Informàtica mòbil. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. Un nou marc semi-supervisat per a la classificació de cultius i males herbes basada en UAV. PLoS ONE 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Una visió general de les aplicacions actuals i potencials de la teledetecció tèrmica en l'agricultura de precisió. Informàtica. Electró.
Agrícola. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolució de l'Internet de les coses (IoT) i el seu impacte significatiu en l'àmbit de l'agricultura de precisió. Informàtica. Electró. Agrícola. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. Compromís dels empleats per a organitzacions sostenibles: anàlisi de paraules clau mitjançant anàlisi i explosió de xarxes socials
enfocament de detecció. Sostenibilitat 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Integració terrestres i transportats per drons
Mètodes de detecció hiperespectral i fotogramètrica per a la cartografia d'exploració i el seguiment de la mineria. Teledetecció 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Recompte de plantes de blat de moro mitjançant aprenentatge profund i imatges d'UAV. IEEE Geosci. Remote Sens. Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Aprenentatge automàtic automàtic per al fenotipatge de plantes basat en imatges d'alt rendiment. Teledetecció 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. Tendències tecnològiques modernes en el desenvolupament de l'ecosistema d'UAV de càrrega. J. Phys. Conf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM per a la ramaderia i l'agricultura d'interior mitjançant un petit drone amb una càmera monocular: un estudi de viabilitat.
Drones 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Enquesta de drones per a l'automatització agrícola des de la plantació fins
collita. A: INES 2018 – IEEE 22nd International Conference on Intelligent Engineering Systems, pàg. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. Punts de vista i reptes del marc IoT d'UAV: cap a la protecció dels drons com a "Coses". Sensors 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. Procediments de processament i classificació d'imatges per a l'anàlisi d'imatges subdecímetres adquirides amb una aeronau no tripulada sobre arides
terres de pastura. GISci. Remote Sens. 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. Vehicles aeris no tripulats per a la cartografia i el seguiment de pastures: una comparació de dos sistemes. Actes de la Conferència Anual de l'ASPRS.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. Un flux de treball de codi obert per al cartografia de males herbes a les praderies natives
utilitzant vehicle aeri no tripulat: utilitzant Rumex obtusifolius com a cas pràctic. Eur. J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. Adopció, rendibilitat i millor ús de les dades d'agricultura de precisió.
Paper de treball. Universitat de Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb´e, S., Baret, F., 2008. Avaluació d'imatges de vehicles aeris no tripulats per al seguiment quantitatiu del cultiu de blat en parcel·les petites. Sensors 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. Disseny d'agricultura intel·ligent basada en big data i Internet de les coses. Int. J. Distribuir. Xarxa de Sens. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. Estimació remota de l'alçada del dosser i de la biomassa de blat de moro sobre el sòl mitjançant imatges estèreo d'alta resolució d'un sistema de vehicles aeri no tripulats de baix cost. Ecol. Ind. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Aprenentatge automàtic a l'agricultura: una revisió. Sensors 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Fenotipat aeri i remot dels trets del blat de moro amb un enfocament multisensor mòbil. Plant Methods 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Detecció i recompte de panícules de sorgo mitjançant imatges de sistemes aeri no tripulats i aprenentatge profund. Davant. Planta Sci. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Sistema de monitorització d'Internet de les coses de l'agricultura ecològica moderna basat en la computació en núvol. Accés IEEE 7, 37050–37058.
López-Granados, ´ F., 2011. Detecció de males herbes per a la gestió de males herbes específica del lloc: cartografia i enfocaments en temps real. Males herbes Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. Seguiment precoç basat en objectes d'una mala herba en un cultiu d'herba mitjançant imatges d'UAV d'alta resolució. Agron. Mantenir. Dev. 36 (4), 1–12
López-Granados, ´ F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. Cartografia de males herbes a principis de temporada al gira-sol mitjançant tecnologia UAV: variabilitat dels mapes de tractament d'herbicides contra els llindars de males herbes. Precis. Agrícola. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS: espectroscòpia d'imatges a partir d'un sistema d'avió no tripulat multirotor. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A. i Kleemola, J., 2008. Escaneig làser terrestre de cultius agrícoles. En JJ
Chen J. Maas H–G. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 37, pàg. 563–566).
Societat Internacional de Fotogrametria i Teledetecció. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. Una revisió de la classificació d'imatges de coberta terrestre basada en objectes supervisats. ISPRS J. Photogramm. Remote Sens. 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. Perspectives per a la teledetecció amb vehicles aeris no tripulats en l'agricultura de precisió. Tendències Plant Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Fenotipat de soja basat en un sistema aeri no tripulat (UAS) mitjançant fusió de dades multisensor i màquina d'aprenentatge extrem. ISPRS J. Photogramm. Remote Sens. 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
Monitorització de cultius mitjançant la fusió de dades de satèl·lit/UAV i aprenentatge automàtic. Teledetecció 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth , B., 2018. Sobre l'ús de sistemes aeris no tripulats per a
vigilància ambiental. Teledetecció 10 (4), 641.
Marinko, RA, 1998. Citacions a revistes d'estudis sobre dones en dissertacions, 1989 i The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Gestió de recursos en xarxes sense fils assistides per UAV: una perspectiva d'optimització. Xarxa Ad Hoc. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Aplicacions pràctiques d'una plataforma UAV multisensor basada en imatges d'alta resolució multiespectrals, tèrmiques i RGB amb precisió
viticultura. Agricultura 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Més enllà de l'índex NDVI tradicional com a factor clau per integrar l'ús d'UAV en la viticultura de precisió. Ciència. Rep 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 .Comparació d'UAV, avions
i plataformes de teledetecció per satèl·lit per a la viticultura de precisió. Teledetecció 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. Perfeccionament d'un índex de vegetació impulsat per satèl·lit per a la precisió basat en l'aprenentatge automàtic i UAV
agricultura. Sensors 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. Mapping autors in intellectual space: a technique overview. Melmelada. Soc. Informació. Ciència. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. Modelització de l'erosió agrícola: avaluació de les estimacions d'erosió a escala de camp USLE i WEPP mitjançant dades de sèries temporals d'UAV. Entorn. Modell. Programari 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Classificació de les comunitats de pastures natives de les terres baixes mitjançant imatges hiperespectrals del sistema d'aeronaus no tripulades (UAS) al
Midlands de Tasmània. Drones 3 (1), 5.
Messina, G., Modica, G., 2020. Aplicacions de la imatge tèrmica d'UAV en l'agricultura de precisió: estat de l'art i perspectives de recerca futures. Teledetecció 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. Un estudi bibliogràfic sobre big data: conceptes, tendències i reptes. Gestió de processos de negoci. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Millora dels cultius mitjançant conjunts de dades del cicle de vida adquirits en condicions de camp. Davant. Planta Sci. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. Revisió sobre l'aplicació de sistemes de drons en l'agricultura de precisió. Procedia Comput. Ciència. 133, 502–509.
Moharana, S., Dutta, S., 2016. Variabilitat espacial del contingut de clorofil·la i nitrogen de l'arròs a partir d'imatges hiperespectrals. ISPRS J. Photogramm. Remote Sens. 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. Anàlisi de dades d'IoT i agricultura per a una granja intel·ligent. Informàtica. Electró. Agrícola. 156, 467–474.
Nansen, C., Elliott, N., 2016. Perfil de teledetecció i reflectància en entomologia. Ann. Reverent Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Cartografia multiespectral en agricultura: mosaic del terreny mitjançant un UAV quadcopter autònom. Int. Conf.
Sistema d'avions no tripulats. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Internet de les coses dels drons (Iodt): visió futura dels drons intel·ligents. Adv. Intel·ligència. Syst. Informàtica. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. Un sensor multiespectral lleuger per a micro UAV: oportunitats per a la teledetecció aèria de molt alta resolució. Int. Arc. Fotograma. Remote Sens. Spat. Inf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. Aplicacions emergents d'UAV en agricultura. A: 2019 7th International Conference on Robot Intelligence Technology and
Aplicacions (RiTA), pàgs. 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. L'estructura intel·lectual del camp de la gestió estratègica: una anàlisi de co-citació d'autors. Estratègia. Gestionar. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Identificació i seguiment automàtics de malalties de les plantes mitjançant vehicles aeris no tripulats: una revisió. Teledetecció 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV per a aplicacions de mapes en 3D: una revisió. Appl. Geomàtica 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Estimació de l'evapotranspiració amb UAV petits en agricultura de precisió. Sensors 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometria, anàlisi de citacions i anàlisi de cocitacions. A Review of Literature I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, sensors, and data processing in agroforestry: una revisió cap a aplicacions pràctiques. Int. J. Remote Sens. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, EUA, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. Una revisió de solucions de dades basades en drons per als cultius de cereals. Drones 4 (3), 1–29. https://doi.org/10.3390/
drons4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Estimació del contingut d'oli i proteïnes de llavors de sèsam mitjançant processament d'imatges i xarxa neuronal artificial. Melmelada. Oli
Soc. de Químics. 97 (7), 691–702.
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., Weed mapping in early-season maize fields using object-based analysis de
Imatges de vehicles aeris no tripulats (UAV). PLoS ONE 8 (10), e77151.
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
López-Granados, ´ F., 2015. Un sistema semisupervisat per a la cartografia de males herbes en cultius de gira-sol mitjançant vehicles aeris no tripulats i un mètode de detecció de fileres de cultius. Appl. Informàtica suau. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. Dispositius IoT rendibles com a fonts de dades fiables per a un sistema de gestió de l'aigua basat en blockchain en agricultura de precisió. Informàtica. Electró. Agrícola. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Sistema avançat d'UAV-WSN per al seguiment intel·ligent en agricultura de precisió. Sensors 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. Aplicacions de blockchain en cadenes de subministrament, transport i logística: una revisió sistemàtica de la literatura. Int. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. Un vehicle aeri no tripulat flexible per a l'agricultura de precisió.
Precis. Agrícola. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. Bibliografia estadística o bibliometria. J. Document. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. La idoneïtat d'un vehicle aeri no tripulat (UAV) per a l'avaluació de camps i cultius experimentals. Agricultura 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Drones d'agricultura: un avenç modern en l'agricultura de precisió. J. Statis. Gestionar. Syst. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. Una recopilació d'aplicacions d'UAV per a l'agricultura de precisió. Informàtica. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Aplicació de l'anàlisi de big data i la intel·ligència artificial en la investigació agronòmica. indi J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. Una anàlisi bibliomètrica sobre l'ús de vehicles aeris no tripulats en estudis agrícoles i forestals. Int. J. Remote Sens. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
Usos potencials de petits sistemes d'avions no tripulats (UAS) en la investigació de males herbes. Males herbes Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., Els índexs de vegetació es deriven de càmeres de grau de consum muntades en
UAVs prou fiables per avaluar parcel·les experimentals? Eur. J. Agron. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Digitalization in food supply chains: a bibliometric review and key-route main path
anàlisi. Sostenibilitat 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Drones per a la gestió de la cadena de subministrament i la logística: una agenda de revisió i recerca. Int. J. Logista. Res. Appl.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. Tecnologies Blockchain en logística i gestió de la cadena de subministrament: una revisió bibliomètrica. Logística 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Drones humanitaris: una agenda de revisió i recerca. Internet de les coses 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Recerca de blockchain a la sanitat: una revisió bibliomètrica i tendències de recerca actuals. J. de Dades, Inf. i
Gestionar. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Internet of Things research in supply chain management and logistics: a bibliometric analysis. Internet
de les coses 12, 100318.
ReportLinker, 2021. El mercat mundial de drons per a l'agricultura arribarà als 15.2 milions de dòlars a la sala de notícies YearGlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Any-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. Calibració i optimització de la càmera tèrmica sense refrigerar
procés de fotogrametria per a aplicacions d'UAV en agricultura. Sensors (Suïssa) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. Avenços en la recerca de l'hostaleria: "From Rodney Dangerfield to Aretha Franklin". Int. J. Contemporània. Hospital. Gestionar. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Sistema sensorial basat en mini-UAV per a la mesura de variables ambientals en hivernacles. Sensors 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. UAV de qualitat del consumidor utilitzat per detectar i analitzar els patrons de distribució espacial de males herbes a finals de temporada en camps comercials de ceba. Precis. Agrícola. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Unmanned sistema de càmeres espectrals operat per vehicles aeri (UAV) per a aplicacions forestals i agrícoles. Continuar. SPIE – Int. Soc. Opt. Eng. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Anàlisi de barreres per implementar la logística de drons. Int. J. Logista. Res. Appl. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP i Saha, HN, drone basat en IOT per a la millora de la qualitat dels cultius en el camp agrícola. En SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-gener, pp. 612–615). Institut
of Electrical and Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: una comunicació nova i eficient basada en LED per a l'agricultura de precisió. IEEE Conf. Informació. Commun. Tecnol. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. Experiments de vol d'UAV aplicats a la teledetecció de zones vegetades. Teledetecció 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
Sistemes d'imatge aèria a baixa altitud i d'alta resolució per al fenotipatge de cultius de fila i camp: una revisió. Eur. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. Imatge tèrmica d'alta resolució basada en UAV per estimar la
variabilitat instantània i estacional de l'estat de l'aigua de les plantes dins d'una vinya. Agrícola. Gestió de l'aigua. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Beyond citation analysis: A model for assessment of research impact. J. Med. Biblioteca Assoc. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Espectroscòpia d'imatges relacionada amb la ciència del sistema terrestre: una avaluació. Remote Sens. Medi ambient. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Monitorització dels paràmetres agronòmics dels cultius de blat d'hivern amb UAV de baix cost
imatgeria. Teledetecció 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. Desenvolupament i aplicació d'un vehicle aeri no tripulat autònom per al mostreig aerobiològic precís anterior
camps agrícoles. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
Permet l'agricultura de precisió mitjançant la detecció integrada amb intel·ligència artificial. IEEE Trans. Instrum. Mes. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Vehicles aeris no tripulats (UAV): una enquesta sobre aplicacions civils i reptes clau de recerca. Accés IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. Agricultura impulsada per grans dades: anàlisi de grans dades en la millora de plantes, la genòmica i l'ús de la teledetecció.
tecnologies per avançar en la productivitat dels cultius. Phenome vegetal J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. Anàlisi comparada i implicació d'UAV i IA en investigacions forenses. A: Proceedings – 2019 Amity International
Jornada sobre Intel·ligència Artificial. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. El paper de la intel·ligència artificial en la gestió de la cadena de subministrament: cartografiar el territori. Int. J.
Prod. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. Vehicles aeris no tripulats per a fenotipatge i investigació agronòmica d'alt rendiment. PLoS ONE
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. Captura de l'heterogeneïtat del rodal de blat de moro a través de zones d'estabilitat de rendiment mitjançant una antena no tripulada
Vehicles (UAV). Sensors 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Cocitació en la literatura científica: una nova mesura de la relació entre dos documents. Melmelada. Soc. Informació. Ciència. 24 (4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. Visualizing science by citation mapping. Melmelada. Soc. Informació. Ciència. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. Recompte de bestiar en estat salvatge amb imatges aèries geolocalitzades en grans zones de pastura. Informàtica. Electró. Agrícola. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. Un enfocament per a l'optimització de rutes en aplicacions d'agricultura de precisió mitjançant UAV. Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. Implementant l'agricultura de precisió al segle XXI. J. Agric. Eng. Res. 21 (76), 3–267.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Avaluació de la sequera del blat mitjançant imatges de teledetecció mitjançant vehicles aeri no tripulats. El 2018, 37a Conferència de control xinès (CCC).
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. Monitorització de l'òxid groc del blat aprenent d'imatges aèries multiespectrals d'UAV.
Informàtica. Electró. Agrícola. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021. Innovació de la gestió econòmica agrícola en el procés de construcció d'agricultura intel·ligent mitjançant big data. Informàtica Sostenible. Inf. Syst. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. Avaluació de la sensibilitat d'un sistema aeri infraroig tèrmic no tripulat per detectar l'estrès hídric en un dosser de cotó. Trans. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. Integració de l'índex de vegetació basat en RGB, model de superfície de cultiu i enfocament d'anàlisi d'imatges basat en objectes per a l'estimació del rendiment de la canya de sucre mitjançant vehicle aeri no tripulat. Informàtica. Electró. Agrícola. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. Un sistema de cartografia hiperespectral lleuger per a
vehicles aeris no tripulats: els primers resultats. A: 2013 5th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), pàgs. 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. Un hiperespectral lleuger
sistema de cartografia i cadena de processament fotogramètric per a vehicles aeris no tripulats. Teledetecció 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. Estratègies de control avançades mitjançant processament d'imatges, UAV i IA a l'agricultura: una revisió. Món J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Processament de la informació utilitzant cites per investigar la influència de la revista en la comptabilitat. Inf. Procés. Gestionar. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Una enquesta sobre la xarxa 5G i el seu impacte en l'agricultura: reptes i oportunitats. Informàtica.
Electró. Agrícola. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. La presa de decisions basada en dades en l'agricultura de precisió: l'augment del big data en els sistemes agrícoles. J. Agric. Informació alimentària.
20 (4), 344-380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. Estimació del rendiment i l'alçada de la planta del blat d'hivern mitjançant UAV- imatges hiperespectrals basades.
Sensors 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. Mostreig aerobiològic coordinat d'un patogen vegetal a la baixa atmosfera mitjançant dos vehicles aeris no tripulats autònoms. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. Detecció i classificació de plagues de la soja mitjançant l'aprenentatge profund
amb imatges d'UAV. Informàtica. Electró. Agrícola. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. The Use of Uas for Assessing Agricultural Systems in AN Wetland in Tanzania in the— I WetSeason per a una agricultura sostenible i proporcionar la veritat del terreny per a les dades de Terra-Sar X. A: ISPRS – Arxius internacionals de fotogrametria, teledetecció i ciències de la informació espacial, pàgs. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Bibliometria a webometria. J. Info. Ciència. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. An automatic object-based method for optimal thresholding in UAV images: application for vegetation detection in herbaceous cultures. Informàtica. Electró. Agrícola. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. Monitorització 3-D d'alt rendiment de plantacions agrícoles d'arbres amb Tecnologia de vehicles aeris no tripulats (UAV). PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, López-Granados, ´ F., 2014. Cartografia multitemporal de la fracció de vegetació en camps de blat de primera temporada mitjançant imatges d'UAV. Informàtica. Electró. Agrícola. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. Una revisió de les aplicacions basades en UAV per a l'agricultura de precisió. Informació (Suïssa) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Optimització de la planificació del vol de drons per mesurar l'estructura dels cultius d'arbres hortícoles. ISPRS J. Photogramm.
Remote Sens. 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Internet de les coses a l'agricultura, avenços recents i reptes de futur. Biosist. Eng. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Mapping scientometric of computer science research in Mexico. Cienciometria 105 (1), 97–114.
ONU., 2019. World population perspectives 2019. https://population.un.org/wpp/ (Consulta el 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Caracterització dels arrossars mitjançant un sistema de sensor hiperespectral en miniatura muntat amb UAV. IEEE J. Sel. Superior. Appl. Obs de la Terra.
Remote Sens. 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. Drones a
agricultura. Adv. Agron. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
Vehicles aeris no tripulats (UAV) en agricultura de precisió: aplicacions i reptes. Energies 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. Mapeig i classificació d'hàbitats marins ecològicament sensibles mitjançant aèria no tripulada
Imatges de vehicles (UAV) i anàlisi d'imatges basades en objectes (OBIA). Teledetecció 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Green area index from an unmanned aerial system over wheat and rapeseed crops . Remote Sens. Medi ambient. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. Desplegament de quatre sensors òptics basats en UAV sobre pastures: reptes i
limitacions. Biogeociències 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Internet de les coses subterrànies en l'agricultura de precisió: aspectes d'arquitectura i tecnologia. Xarxa Ad Hoc. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. La intel·ligència artificial responsable com a ingredient secret per a la salut digital: anàlisi bibliomètrica, coneixements i direccions de recerca.
Informació. Syst. Davant. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Anàlisi bibliomètrica de la tendència de recerca de teledetecció en el seguiment del creixement dels cultius: un estudi de cas a la Xina. Teledetecció 11 (7). https://doi.org/10.3390/rs11070809.
White, HD, Griffith, BC, 1981. Cocitació de l'autor: una mesura de la literatura de l'estructura intel·lectual. Melmelada. Soc. Informació. Ciència. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Desenvolupament d'un sistema de teledetecció agrícola de baix cost basat en un vehicle aeri no tripulat (UAV) autònom. Biosist. Eng. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. Una revisió sobre els trets de fenotipatge d'alt rendiment de les plantes mitjançant sensors basats en UAV. Informàtica. Electró. Agrícola. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Vehicle aeri no tripulat per a aplicacions de teledetecció: una revisió. Teledetecció 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. Seguiment de persones en moviment i eliminació de pistes falses amb imatges tèrmiques d'infrarojos mitjançant un multirotor. Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. Una comparació de l'estimació dels paràmetres de cultiu mitjançant imatges des de muntat en UAV
sensor hiperespectral instantània i càmera digital d'alta definició. Teledetecció 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Estimació de la biomassa aèria de blat d'hivern mitjançant vehicles aeri no tripulats- instantània basada
Sensor hiperespectral i models millorats d'alçada de cultiu. Teledetecció 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. Utilització de vehicles aeris no tripulats lleugers per controlar la recuperació dels boscos tropicals. Biol.
Conserv. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
Plataforma d'IoT d'agricultura intel·ligent basada en edge i cloud computing. Biosist. Eng. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. Quantificació de l'alçada dels arbres mitjançant imatges de molt alta resolució adquirides a partir d'una antena no tripulada.
vehicles (UAV) i mètodes automàtics de reconstrucció fotogràfica en 3D. Eur. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. Fenotipat basat en imatges de la intensitat de floració en cultius de temporada fresca. Sensors 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. L'aplicació de petits sistemes aeris no tripulats per a l'agricultura de precisió: una revisió. Precis. Agrícola. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. Cartografia de l'estrès hídric del blat de moro basat en la teledetecció multiespectral d'UAV. Teledetecció 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. Un enfocament basat en l'aprenentatge profund per a l'òxid groc automatitzat
detecció de malalties a partir d'imatges d'UAV hiperespectrals d'alta resolució. Teledetecció 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Detecció i discriminació de malalties i estrès d'insectes de plantes de te mitjançant imatges hiperespectrals combinades amb anàlisi wavelet. Informàtica. Electró. Agrícola. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Adaptació del domini adversari guiada per entropia per a la segmentació semàntica d'imatges aèries. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Detecció de la fenologia de l'arròs mitjançant l'anàlisi de sèries temporals de l'espectre terrestre. dades d'índex. Cultius de camp Res. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Disseny d'un sistema de sembra de fuites d'agricultura de precisió basat en sensors sense fil. Int. J. Online Eng. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. Anàlisi dels canvis d'alçada de les plantes del blat de moro allotjat mitjançant dades UAV-LiDAR. Agricultura 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: un programari d'anàlisi d'imatges de blat de moro que utilitza aprenentatge profund per al fenotipatge de plantes d'alt rendiment. . Plant Methods 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Predicció del rendiment de gra en arròs utilitzant vegetació multitemporal
índexs d'imatges digitals i multiespectrals basades en UAV. ISPRS J. Photogramm. Remote Sens. 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. Simulació de la tecnologia bàsica d'un sistema de monitorització d'hivernacles basat en una xarxa de sensors sense fil. Int. J. Online Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. Avaluació de l'estrès hídric dels cultius amb imatges tèrmiques d'infrarojos en agricultura de precisió: una revisió
i perspectives futures per a aplicacions d'aprenentatge profund. Informàtica. Electró. Agrícola. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}